私人兼职做网站开发长沙seo网站管理
ROS2节点通信之话题与服务点
- 引言
- 1 理解从通信开始
- 1.1 TCP(传输控制协议)
- 1.2 UDP(用户数据报协议)
- 1.3 基于共享内存的IPC方式
- 2 ROS2话题
- 2.1 ROS2话题指令
- 2.2 话题之RCLPY实现
- 2.2.1 编写发布者
- 2.2 2 编写订阅者
- 2.2.3 运行测试
- 3 ROS2服务
- 3.1 ROS2服务指令
- 3.2 服务之RCLPY实现
- 3.2.1 编写客户端
- 3.2 2 编写服务端
- 3.2.3 运行测试
引言
笔者跟着鱼香ROS的ROS2学习之旅
学习参考:
【ROS2机器人入门到实战】
笔者的学习目录
- MOMO的鱼香ROS2(一)ROS2入门篇——从Ubuntu操作系统开启
- 【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
- ROS2】MOMO的鱼香ROS2(三)ROS2入门篇——ROS2第一个节点
专业术语认识
- TCP(传输控制协议)
- UDP(用户数据报协议)
1 理解从通信开始
通信的目的是在计算机系统中实现不同组件、进程或设备之间的信息和数据传递。通过通信,各个实体可以共享信息、协调行动并实现协同工作。在计算机领域,通信是构建分布式系统、网络和协议的基础。
通信的原理涉及两个主要方面:通信协议和通信方式。
通信协议定义了数据的格式、传输方式、错误检测和纠正等规则,以确保可靠的数据传输。
通信方式涉及了不同的通信介质和技术,包括网络通信和进程间通信(IPC)。
1.1 TCP(传输控制协议)
使用ping命令进行基于UDP的网络通信:
# 修改为自己的ip地址
ping 192.168.2.42
ping 192.168.2.36

1.2 UDP(用户数据报协议)
使用nc命令进行基于TCP的网络通信:
# 终端1
nc -l 1234
# 终端2
echo "Hello, TCP!" | nc 127.0.0.1 1234
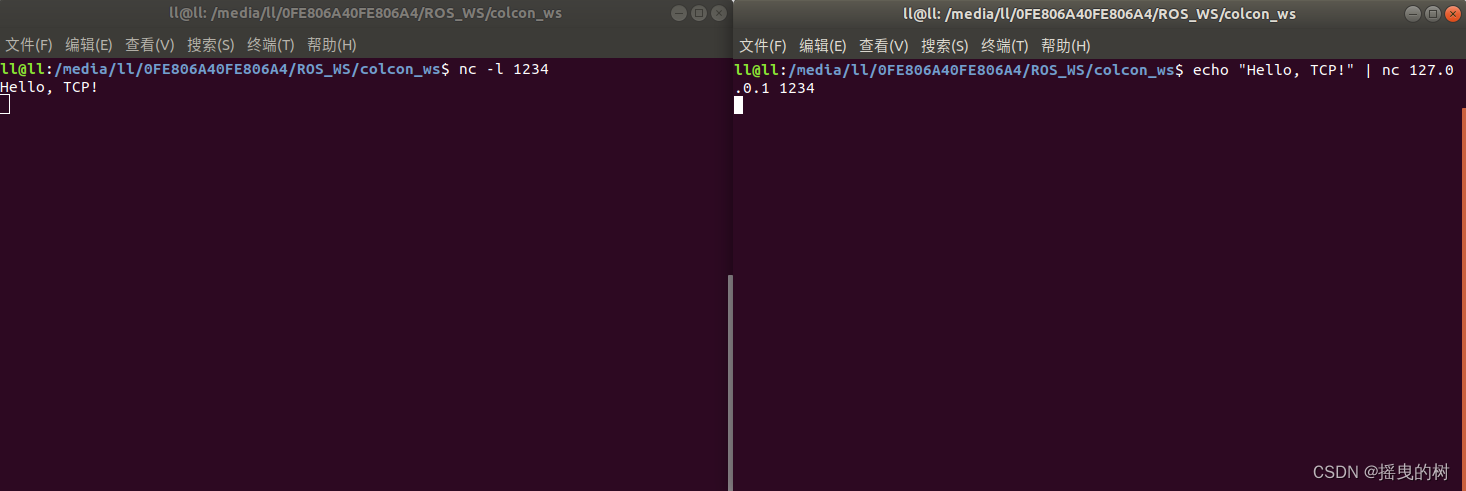
关于TCP的通信可以参考笔者的博客:【Python】基于socket函数的TCP通信
1.3 基于共享内存的IPC方式
基于共享内存的进程间通信(IPC)方式
通过ipcs命令查看当前系统中的共享内存段:
ipcs -m
使用ipcrm命令删除不再需要的共享内存段:
ipcrm -m <shmid>
2 ROS2话题
一个节点发布数据到某个话题上,另外一个节点就可以通过订阅话题拿到数据。
ROS2话题通信其实还可以是1对n,n对1,n对n的。
同一个话题,所有的发布者和接收者必须使用相同消息接口。

2.1 ROS2话题指令
1.查看所有话题
ros2 topic list
# 增加查看消息类型
ros2 topic list -t
2.打印实时话题内容
ros2 topic echo <topic_name>
3.查看主题信息
ros2 topic info <topic_name>
2.2 话题之RCLPY实现
创建功能包
cd ROS_WS/colcon_ws/src
ros2 pkg create imu_py --build-type ament_python --dependencies rclpy
创建节点文件
cd ROS_WS/colcon_ws/src/imu_py
touch imu_publisher.py
touch imu_subscribe.py
2.2.1 编写发布者
imu_publisher.py
# -*- coding: utf-8 -*-
"""
1.查看映射端口
ls /dev/ttyUSB*
2.更改端口的权限
sudo chmod 777 /dev/ttyUSB0
"""
import rclpy
from rclpy.node import Node
# 话题接口
from sensor_msgs.msg import Imu # imu接口
# Usart Library
import serial# imu接收数据类型
class IMUPublisher(Node):def __init__(self,name):super().__init__(name) # 继承父类,初始化名称self.get_logger().info("大家好,我是%s!" % name)self.publisher_node = self.create_publisher(Imu, 'imu_data', 1) # 创建发布imu数据的发布者到话题:imu_data上# 串口初始化self.IMU_Usart = serial.Serial(port='/dev/ttyUSB0', # 串口baudrate=115200, # 波特率timeout=0.001 # 由于后续使用read_all按照一个timeout周期时间读取数据# imu在波特率115200返回数据时间大概是1ms,9600下大概是10ms# 所以读取时间设置0.001s)# 接收数据初始化self.ACC_X: float = 0.0 # X轴加速度self.ACC_Y: float = 0.0 # Y轴加速度self.ACC_Z: float = 0.0 # Z轴加速度self.GYRO_X: float = 0.0 # X轴陀螺仪self.GYRO_Y: float = 0.0 # Y轴陀螺仪self.GYRO_Z: float = 0.0 # Z轴陀螺仪self.roll: float = 0.0 # 横滚角self.pitch: float = 0.0 # 俯仰角self.yaw: float = 0.0 # 航向角self.leve: float = 0.0 # 磁场校准精度self.temp: float = 0.0 # 器件温度self.MAG_X: float = 0.0 # 磁场X轴self.MAG_Y: float = 0.0 # 磁场Y轴self.MAG_Z: float = 0.0 # 磁场Z轴self.Q0: float = 0.0 # 四元数Q0.0self.Q1: float = 0.0 # 四元数Q1self.Q2: float = 0.0 # 四元数Q2self.Q3: float = 0.0 # 四元数Q3# 判断串口是否打开成功if self.IMU_Usart.isOpen():print("open success")else:print("open failed")# 回调函数返回周期time_period = 0.001self.timer = self.create_timer(time_period, self.timer_callback)def timer_callback(self):"""定时器回调函数"""# ----读取IMU的内部数据-----------------------------------try:count = self.IMU_Usart.inWaiting()if count > 0:# 发布sensor_msgs/Imu 数据类型imu_data = Imu()imu_data.header.frame_id = "map"imu_data.header.stamp = self.get_clock().now().to_msg()imu_data.linear_acceleration.x = self.ACC_Ximu_data.linear_acceleration.y = self.ACC_Yimu_data.linear_acceleration.z = self.ACC_Zimu_data.angular_velocity.x = self.GYRO_X * 3.1415926 / 180.0 # unit transfer to rad/simu_data.angular_velocity.y = self.GYRO_Y * 3.1415926 / 180.0imu_data.angular_velocity.z = self.GYRO_Z * 3.1415926 / 180.0imu_data.orientation.x = self.Q0imu_data.orientation.y = self.Q1imu_data.orientation.z = self.Q2imu_data.orientation.w = self.Q3self.publisher_node.publish(imu_data) # 发布imu的数据self.get_logger().info(f'发布了指令:{imu_data.header.frame_id}') #打印一下发布的数据# --------------------------------------------------------# print('读取中')except KeyboardInterrupt:if serial != None:print("close serial port")self.IMU_Usart.close()def main(args=None):"""ros2运行该节点的入口函数编写ROS2节点的一般步骤1. 导入库文件2. 初始化客户端库3. 新建节点对象4. spin循环节点5. 关闭客户端库"""rclpy.init(args=args) # 初始化rclpynode = IMUPublisher("imu_publisher") # 新建一个节点rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)rclpy.shutdown() # 关闭rclpy
2.2 2 编写订阅者
imu_subscribe.py
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
# 话题接口
from sensor_msgs.msg import Imu # imu接口class IMUSubscribe(Node):def __init__(self,name):super().__init__(name)self.get_logger().info("大家好,我是%s!" % name)self.imu_subscribe_node = self.create_subscription(Imu, 'imu_data',self.imu_callback, 1) # 创建发布imu数据的发布者到话题:imu_data上def imu_callback(self, imu_data):self.get_logger().info(f'收到[{imu_data.header.frame_id}]命令')def main(args=None):rclpy.init(args=args) # 初始化rclpynode = IMUSubscribe("imu_subscribe") # 新建一个节点rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)rclpy.shutdown() # 关闭rclpy
2.2.3 运行测试
修改下setup.py
entry_points={'console_scripts': ["imu_publisher=imu_py.imu_publisher:main", "imu_subscribe=imu_py.imu_subscribe:main",],},
发布节点
colcon build --packages-select imu_py
source install/setup.bash
ros2 run imu_py imu_publisher
订阅节点
source install/setup.bash
ros2 run imu_py imu_subscribe

可视化
rqt
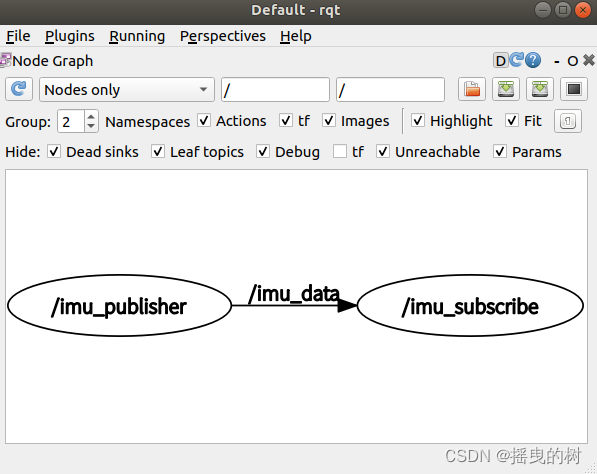
上图中的节点名称取决于下图

3 ROS2服务
服务分为客户端和服务端,服务-客户端模型也可以称为请求-响应模型,不同于话题是没有返回的,适用于单向或大量的数据传递。而服务是双向的,客户端发送请求,服务端响应请求。
注意:
同一个服务(名称相同)有且只能有一个节点来提供
同一个服务可以被多个客户端调用
3.1 ROS2服务指令
启动服务端
ros2 run examples_rclpy_minimal_service service1.查看所有服务
ros2 service list
2.手动调用服务
ros2 service call /add_two_ints example_interfaces/srv/AddTwoInts "{a: 5,b: 10}"
3.查看服务接口类型
ros2 service type <service_name>
4.查找使用某一接口的服务
ros2 service find example_interfaces/srv/AddTwoInts
3.2 服务之RCLPY实现
创建节点文件
cd ROS_WS/colcon_ws/src/imu_py
touch imu_client.py
touch imu_server.py
3.2.1 编写客户端
imu_client.py
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoIntsclass ServiceClient(Node):def __init__(self,name):super().__init__(name)self.get_logger().info("节点已启动:%s!" % name)self.client_ = self.create_client(AddTwoInts,"add_two_ints_srv") def result_callback_(self, result_future):response = result_future.result()self.get_logger().info(f"收到返回结果:{response.sum}")def send_request(self, a, b):while rclpy.ok() and self.client_.wait_for_service(1)==False:self.get_logger().info(f"等待服务端上线....")request = AddTwoInts.Request()request.a = arequest.b = bself.client_.call_async(request).add_done_callback(self.result_callback_)def main(args=None):rclpy.init(args=args) # 初始化rclpynode = ServiceClient("service_client") # 新建一个节点# 调用函数发送请求node.send_request(3,4)rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)rclpy.shutdown() # 关闭rclpy
3.2 2 编写服务端
imu_server.py
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
# 导入接口
from example_interfaces.srv import AddTwoIntsclass ServiceServer(Node):def __init__(self,name):super().__init__(name)self.get_logger().info("节点已启动:%s!" % name)self.add_ints_server_ = self.create_service(AddTwoInts,"add_two_ints_srv", self.handle_add_two_ints) def handle_add_two_ints(self,request, response):self.get_logger().info(f"收到请求,计算{request.a} + {request.b}")response.sum = request.a + request.breturn responsedef main(args=None):rclpy.init(args=args) # 初始化rclpynode = ServiceServer("service_server") # 新建一个节点rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)rclpy.shutdown() # 关闭rclpy
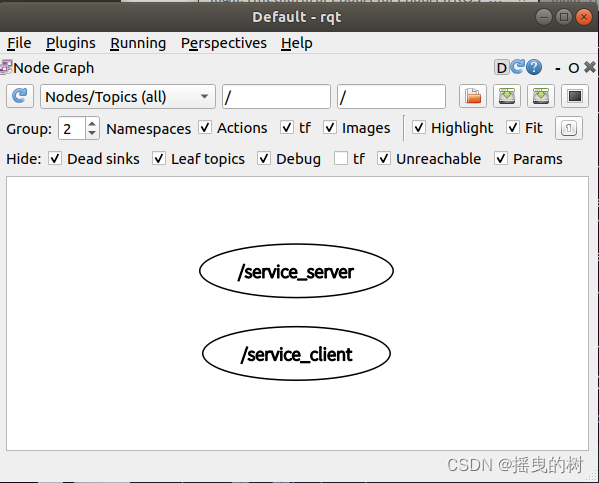
3.2.3 运行测试
修改下setup.py
entry_points={'console_scripts': ["imu_client=imu_py.imu_client:main", "imu_server=imu_py.imu_server:main"],},
发布节点
colcon build --packages-select imu_py
source install/setup.bash
ros2 run imu_py imu_client
订阅节点
source install/setup.bash
ros2 run imu_py imu_server

可视化
rqt