杭州模板建站定制少女长尾关键词挖掘
文章目录
- 前言
- 一、 ROS 文件系统级
- 1). 工作空间 Ws
- 2). 功能包
- 3). 消息 msg
- 4). 服务 srv
- 二、计算图级
- 1). 动态加载节点 nodelet
- 2). 主题 topic
- 3). 服务 srv
- 4). 消息 msg
- 5). 试用练习
- 5). 创建工作空间
- 6). 创建 ROS 功能包和元功能包
- 7). 编译ROS功能包
- 8). 使用 ROS 节点
- 9). 使用主题与节点交互 rostopic
- 10). 使用服务 rosservice
- 11). 使用参数服务器 rosparam
- 12). 创建节点
- 13). 编译节点
- 14). 创建 msg 和 srv 文件
- 15). 使用 srv 和 msg 文件
- 16). launch
- 17). 动态参数
前言
本文为 11 月 11 日 ROS 学习笔记——ROS 架构及概念,分为 ROS 文件系统级和计算图级两节。
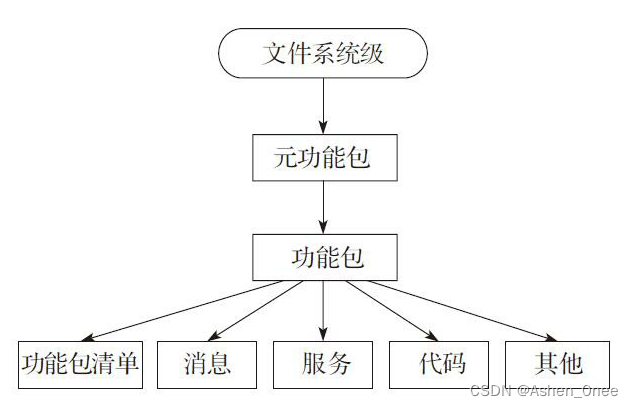
一、 ROS 文件系统级
- 功能包 package:用于创建ROS程序的最小结构和最少内容,包含ROS运行进程(节点)、配置文件等,
- 功能包清单 package.xml:提供关于功能包、 许可证、依赖关系、编译标志等的信息,
- 元功能包 Metapackage: 几个具有某些功能的包组织在一起,
- 元功能包清单:
- 消息类型 msg type: 进程发送到其他进程的信息,
- 服务类型 srv type: 为 ROS 中由每个进程提供的服务定义请求和响应数据结构。
1). 工作空间 Ws
工作空间就是一个文件夹,包含功能包,功能包又包含源文件和环境或工作空间,提供编译这些功能包的一种方式.
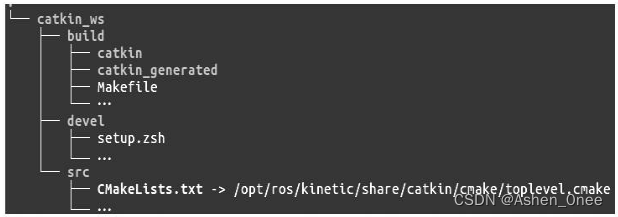
- 源文件空间 src:放置功能包、项目、复制的包等。最重要的一个文件是 CMakeLists.txt,
- 编译空间 build:为功能包和项目保存缓存信息、配置和其他中间文件。
- 开发空间 devel:用来保存编译后的程序,无须安装就能用来测试的程序。
2). 功能包
功能包是一种特定结构的文件和文件夹组合,结构如下:
- include/package_name/:包含需要的库的头文件,
- msg/: 存放非标准信息,
- scripts/: 存放Bash、Python或任何其他脚本语言的可执行脚本,
- src/: 存储程序源文件,
- srv/: 服务类型,
- package.xml: 功能包清单文件。
package.xml 必须在每个功能包中,用来说明此包相关的各类信息,包括包的名称、依赖关系等信息。两个典型标记 <build_depend> 和 <run_depend>:
- <build_depend>: 显示当前功能包安装之前必须先安装哪些功能包
- <run_depend>: 显示运行功能包中代码所需要的包.
3). 消息 msg
消息类型必须具有:字段 field 和常量 constant,如:
- int32 id
- float32 vel
- string name
4). 服务 srv
用以实现节点之间的请求/响应通信。
二、计算图级
ROS 创建一个连接到所有进程的网络。在系统中的任何节点都可以访问此网络,并通过该网络与其他节点交互,获取其他节点发送的信息,并将自身数据发布到网络上。
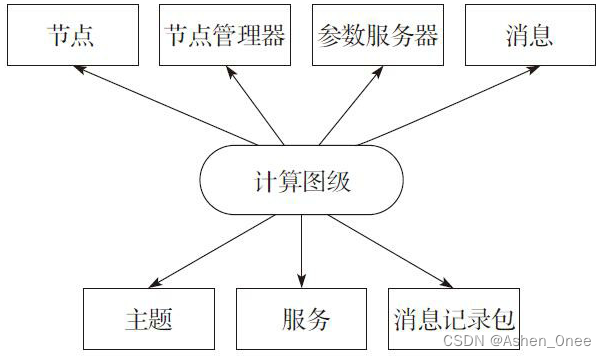
- 节点 node:计算执行进程,与其他节点进行交互。最好让众多节点都具有单一的功能,而不是在系统中创建一个包罗万象的大节点。
- 节点管理器 master:用于节点的名称注册和查找等,也设置节点间的通信。如果在整个ROS中没有节点管理器,就无法与节点、服务、消息等通信。
- 参数服务器: parameter server: 通过参数,就能够在运行时配置节点或改变节点的工作任务。
- 消息 message: 节点通过消息完成彼此的沟通。消息包含一个节点发送到其他节点的信息数据。
- 主题 topic:每个消息都必须有一个名称以便被 ROS 网络分发。节点可以通过订阅某个主题,接收来自其他节点的消息。一个节点可以订阅一个主题,而不需要任何其他节点同时发布该主题。
- 服务 service:服务能够允许我们直接与某个节点进行交互。
- 消息记录包 bag:用于保存和回放ROS消息 数据的文件格式。
1). 动态加载节点 nodelet
内部可通信的多个节点,可以在单个进程中运行多个节点,每个nodelet为一个线程。可以在不使用 ROS 网络的情况下与其他节点通信,节点通信效率更高。 nodelet 对于摄像头和3D传感器这类数据传输量非常大的设备特别有用。
2). 主题 topic
节点间用来传输数据的总线。通过主题进行消息传输不需要节点之间直接连接,发布者和订阅者之间不需要知道彼此是否存在。一个主题可以有多个订阅者,也可以有多个发布者。每个主题都是强类型的,发布到主题上的消息必须与主题的 ROS 消息类型相匹配,并且节点只能接收类型匹配的消息:
- TCP/IP:基于 TCP 传输称为 TCPROS,使用 TCP/IP 长连接,是ROS默认的传输方式;
- UDP:UDPROS,是一种低延迟高效率的传输方式, 但可能产生数据丢失,最适合远程操控之类的任务。
3). 服务 srv
当需要直接与节点通信并以 RPC 方式获得应答时,将无法通过主题实现,而需要使用服务。服务需要由用户开发,节点并不提供标准服务。包含消息源代码的 文件存储在 srv 文件夹中。
服务类型是包名和 .srv 文件名的组合。例如 chapter2_tutorials/srv/chapter2_srv1.srv 文件的服务类型是 chapter2_tutorials/chapter2_srv1
4). 消息 msg
一个节点通过向特定主题发布消息,将信息发送到另一个节点。消息的类型在遵循以下标准命名方式:包名/文件名.msg, 例 如,std_msgs/msg/String.msg 的消息类型是 std_msgs/String
5). 试用练习
- 查找 turtlesim 包的路径
rospack find turtlesim
>>> /opt/ros/noetic/share/turtlesim
- 查找在系统中安装过的某个元功能包
rosstack find ros_comm
>>> /opt/ros/noetic/share/ros_comm
- 获得功能包或功能包集下面的文件列表
rosls turtlesim/
>>> cmake images msg package.xml srv
- 更改当前工作目录
roscd turtlesim/
pwd
>>> /opt/ros/noetic/share/turtlesim
5). 创建工作空间
- 查看 ROS 正在使用的工作空间
echo $ROS_PACKAGE_PATH
>>> /home/li/Documents/Demo01_Ws/src:/opt/ros/noetic/share
- 新建此文件夹
mkdir -p ~/dev/catkin_ws/src
cd ~/dev/catkin_ws/src/
catkin_init_workspace
- 编译工作空间
cd ~/dev/catkin_ws/
catkin_make
- 完成配置
source devel/setup.bash
6). 创建 ROS 功能包和元功能包
cd ~/dev/catkin_ws/src/
catkin_create_pkg chapter2_tut std_msgs roscpp
7). 编译ROS功能包
cd ~/dev/catkin_ws/
catkin_make
8). 使用 ROS 节点
- 启动一个新的节点
rosrun turtlesim turtlesim_node
- 查看用于程序调试的信息
rosnode info /turtlesim
9). 使用主题与节点交互 rostopic
- 使用箭头键移动海龟
rosrun turtlesim turtle_teleop_key
- 使用以下命令行查看主题清单
rostopic list
>>> /rosout/rosout_agg/turtle1/cmd_vel/turtle1/color_sensor/turtle1/pose
- 运行以下命令行并使用箭头键查看消息产生时发送了哪些数据
rostopic echo /turtle1/cmd_vel
>>> linear: x: 2.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0
---
- 使用以下命令行查看由主题发送的消息类型
rostopic type /turtle1/cmd_vel
>>> geometry_msgs/Twist
- 使用以下命令查看消息字段
rosmsg show geometry_msgs/Twist
>>> geometry_msgs/Vector3 linearfloat64 xfloat64 yfloat64 zgeometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 z
- 直接发布主题使海龟做圆周运动
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:x: 1.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 1.0" 10). 使用服务 rosservice
服务是能够使节点之间相互通信的另一种方法。服务允许节点发送请求和接收响应
- 列出活动服务
rosservice list
>>> /clear/kill/reset/rosout/get_loggers/rosout/set_logger_level/spawn/turtle1/set_pen/turtle1/teleport_absolute/turtle1/teleport_relative/turtlesim/get_loggers/turtlesim/set_logger_level
- 查看某个服务的类型
rosservice type /clear
>>> std_srvs/Empty
- 调用服务
rosservice call /clear
- 以不同的方向在另一个位置创建另一只海龟
rosservice type /spawn | rossrv show // 查看该服务的类型
>>> float32 xfloat32 yfloat32 thetastring name---string namerosservice call /spawn 3 3 0.2 "new_turtle" // 调用服务
11). 使用参数服务器 rosparam
参数服务器用于存储所有节点均可访问的数据。ROS中用来管理参数服务器的工具称为 rosparam.
- 查看所有节点使用的服务器参数
rosparam list
>>> /rosdistro/roslaunch/uris/host_li_alienware__41685/rosversion/run_id/turtlesim/background_b/turtlesim/background_g/turtlesim/background_r
- 读取参数的某个值
rosparam get /turtlesim/background_b
>>> 255
- 设定一个新的值
rosparam set /turtlesim/background_b 100
- 使用
dump参数保存或加载参数服务器的内容
rosparam dump save.yaml
- 使用
load向参数服务器加载新的数据文件
rosparam load load.yaml namespace
12). 创建节点
创建两个节点:一个发布数据,另一个接收数据.
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>/*发布方
*/int main(int argc, char **argv)
{// 初始化节点ros::init(argc, argv, "example_a");// 进程的处理程序,它允许我们与环境交互ros::NodeHandle n;// 将节点实例化成发布者,将发布的主题和类型的名称告知节点管理器ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message", 1000);// 设置发送数据的频率ros::Rate loop_rate(10);while (ros::ok()) {// 创建消息变量std_msgs::String msg;std::stringstream ss;ss << "I am the example_a_node";msg.data = ss.str();// 继续发布消息chatter_pub.publish(msg);// spinOnce 在主循环中执行一次迭代允许用户执行操作ros::spinOnce();// 将程序挂起loop_rate.sleep();}return 0;
}
#include "ros/ros.h"
#include "std_msgs/String.h"/*订阅方
*/// 回调函数
// 每次节点收到一条消息时,调用该函数处理数据
void chatterCallback(const std_msgs::String::ConstPtr& msg) {ROS_INFO("I heard: [%s]", msg->data.c_str());}int main(int argc, char **argv)
{ros::init(argc, argv, "example_b");ros::NodeHandle n;// 创建一个订阅者,并从主题获取以message为名称的消息数据ros::Subscriber sub = n.subscribe("message", 1000,chatterCallback);// 运行到这里时调用 chatterCallback 回调函数ros::spin();return 0;
}
13). 编译节点
- 修改 CMakeLists.txt
add_executable(example1_a src/example1_a.cpp)
add_executable(example1_b src/example1_b.cpp)add_dependencies(example1_a ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(example1_b ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(example1_a${catkin_LIBRARIES}
)
target_link_libraries(example1_b${catkin_LIBRARIES}
)
- 启动 roscore,并在不同的命令行窗口下分别运行两个节点
roscore
rosrun demo01_pub_cli example1_a
rosrun demo01_pub_cli example1_b>>> [ INFO] [1700051508.077304984]: I heard: [I am the example_a_node][ INFO] [1700051508.177173843]: I heard: [I am the example_a_node][ INFO] [1700051508.277239966]: I heard: [I am the example_a_node]...
- 使用
rosnode和rostopic命令来调试和查看当前节点的运行状况
rosnode info /example_b
>> Node [/example_b]Publications: * /rosout [rosgraph_msgs/Log]Subscriptions: * /message [std_msgs/String]Services: * /example_b/get_loggers* /example_b/set_logger_level
rostopic info /message
>>> Type: std_msgs/StringPublishers: * /example_aSubscribers: * /example_b
rostopic type /message
>>> std_msgs/String
rostopic bw /message
>>> subscribed to [/message]average: 296.19B/smean: 27.00B min: 27.00B max: 27.00B window: 10
14). 创建 msg 和 srv 文件
- 首先创建一个新的 .msg 文件,添加:
int32 A
int32 B
int32 C
- 编辑 package.xml ,取消注释:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
- 编辑 CMakeList.txt,并编译
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)generate_messages(DEPENDENCIESstd_msgs
)# Generate messages in the 'msg' folder
add_message_files(FILESchapter2_msg1.msg
)# Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESstd_msgs
)
- 检查编译是否成功,如果看到与 .msg 文件中看到一样的内容,说明编译正确
rosmsg show demo01_pub_cli/chapter2_msg1
>>> int32 Aint32 Bint32 C
- 创建一个新的 .srv 文件:
int32 A
int32 B
int32 C
---
int32 sum
- 编辑 package.xml ,取消注释:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
- 编辑 CMakeList.txt,并编译
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo01_pub_cliCATKIN_DEPENDS message_runtime
# DEPENDS system_lib
)# Generate messages in the 'msg' folder
add_message_files(FILESchapter2_msg1.msg
)# Generate services in the 'srv' folder
add_service_files(FILESchapter2_srv1.srv
)# Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESstd_msgs
)
- 检查编译是否成功,如果看到与 .msg 文件中看到一样的内容,说明编译正确
rossrv show demo01_pub_cli/chapter2_srv1
>>> int32 Aint32 Bint32 C---int32 sum
15). 使用 srv 和 msg 文件
该服务将对三个整数求和,需要两个节点:一个 服务器 和一个 客户端 。
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_srv1.h"/*服务端
*/// 回调函数
bool add(demo01_pub_cli::chapter2_srv1::Request &req,demo01_pub_cli::chapter2_srv1::Response &res) {res.sum = req.A + req.B + req.C;ROS_INFO("request: A=%d, B=%d, C=%d", (int)req.A, (int)req.B,(int)req.C);ROS_INFO("sending back response: [%d]", (int)res.sum);return true;}int main(int argc, char **argv)
{ros::init(argc, argv, "add_3_ints_server");ros::NodeHandle n;// 创建服务并在 ROS 中发布广播ros::ServiceServer service = n.advertiseService("add_3_ints", add);ROS_INFO("Ready to add 3 ints.");ros::spin();return 0;
}
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_srv1.h"
#include <cstdlib>/*客户端
*/int main(int argc, char **argv)
{ros::init(argc, argv, "add_3_ints_client");if (argc != 4) {ROS_INFO("usage: add_3_ints_client A B C");return 1;}ros::NodeHandle n;// 创建客户端,名为 add_3_intsros::ServiceClient client = n.serviceClient<demo01_pub_cli::chapter2_srv1>("add_3_ints");// 创建 srv 请求类型的实例// 加入需要发送的数据值demo01_pub_cli::chapter2_srv1 srv;srv.request.A = atoll(argv[1]);srv.request.B = atoll(argv[2]);srv.request.C = atoll(argv[3]);// 调用服务并发送数据if (client.call(srv)) {ROS_INFO("Sum: %ld", (long int)srv.response.sum);} else {ROS_ERROR("Failed to call service add_3_ints");return 1;}return 0;
}
- 编译 CMakeList.txt
add_executable(example2_a src/example2_a.cpp)
add_executable(example2_b src/example2_b.cpp)add_dependencies(example2_a ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(example2_b ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(example2_a${catkin_LIBRARIES}
)
target_link_libraries(example2_b${catkin_LIBRARIES}
)
- 启动节点
rosrun demo01_pub_cli example2_a
>>> [ INFO] [1700059229.228592862]: Ready to add 3 ints.[ INFO] [1700059253.580802115]: request: A=1, B=2, C=3[ INFO] [1700059253.580825139]: sending back response: [6]
rosrun demo01_pub_cli example2_b 1 2 3
>>> [ INFO] [1700059253.580914856]: Sum: 6
- 创建发布和订阅节点
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_msg1.h"
#include <sstream>int main(int argc, char **argv)
{ros::init(argc, argv, "example3_a");ros::NodeHandle n;ros::Publisher pub = n.advertise<demo01_pub_cli::chapter2_msg1>("message", 1000);ros::Rate loop_rate(10);while (ros::ok()) {demo01_pub_cli::chapter2_msg1 msg;msg.A = 1;msg.B = 2;msg.C = 3;pub.publish(msg);ros::spinOnce();loop_rate.sleep();}return 0;
}
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_msg1.h"void messageCallback(const demo01_pub_cli::chapter2_msg1::ConstPtr& msg) {ROS_INFO("I heard: [%d] [%d] [%d]", msg->A, msg->B, msg->C);}int main(int argc, char **argv)
{ros::init(argc, argv, "example3_b");ros::NodeHandle n;ros::Subscriber sub = n.subscribe("message", 1000, messageCallback);ros::spin();return 0;
}
- 编译 CMakeList.txt
add_executable(example3_a src/example3_a.cpp)
add_executable(example3_b src/example3_b.cpp)add_dependencies(example3_a ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(example3_b ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(example3_a${catkin_LIBRARIES}
)
target_link_libraries(example3_b${catkin_LIBRARIES}
)
- 启动节点
rosrun demo01_pub_cli example3_a
rosrun demo01_pub_cli example3_b
>>> [ INFO] [1700061493.409080424]: I heard: [1] [2] [3][ INFO] [1700061493.509095136]: I heard: [1] [2] [3][ INFO] [1700061493.609056521]: I heard: [1] [2] [3]...
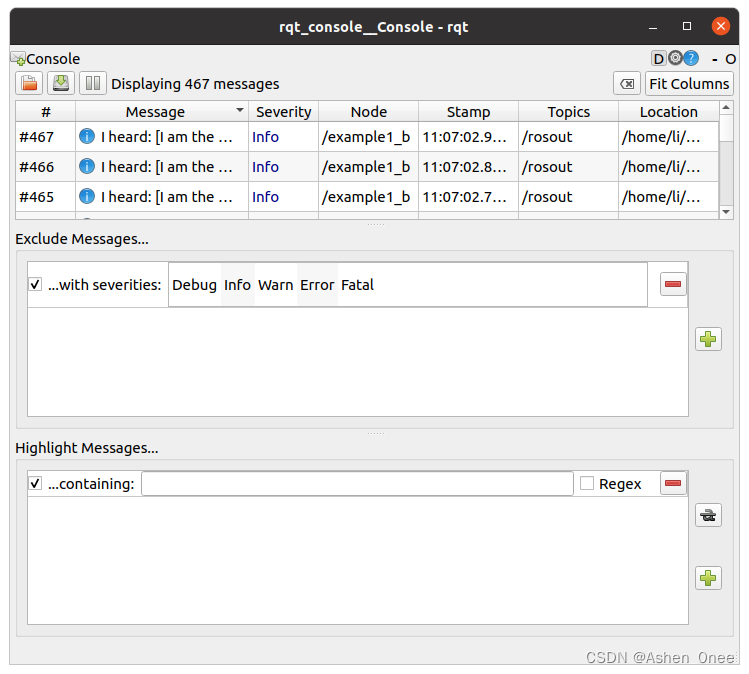
16). launch
用于启动多个节点。 当执行启动文件时,并不需要在 roscore 命令前启动,roslaunch 会启动它。当在 shell中只运行一个节点时,可以看到 ROS_INFO 输出的消息。但是当运行启动文件时,则看不到。
- 创建 .launch 文件
<launch><node name="example1_a" pkg="demo01_pub_cli" type="example1_a" /><node name="example1_b" pkg="demo01_pub_cli" type="example1_b" />
</launch>
- 启动 .launch 文件
roslaunch demo01_pub_cli chapter2.launch
- 查看运行的节点:
rosnode list
>>> /example1_a/example1_b/rosout
- 运行
rqt_console程序看到信息
rqt_console
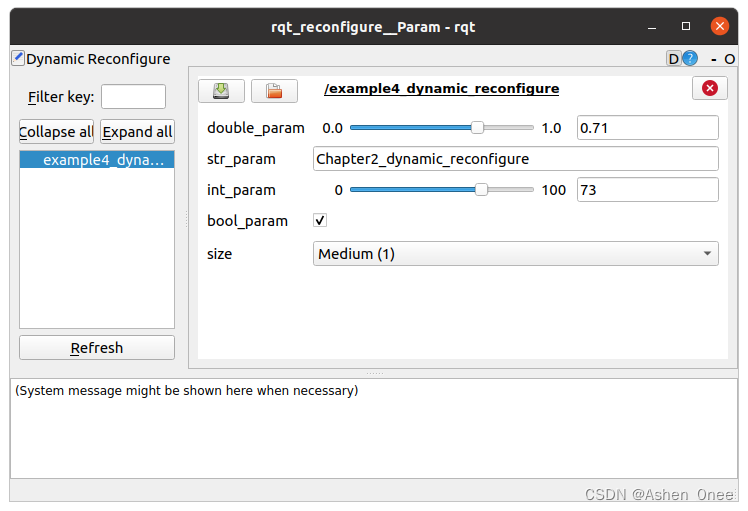
17). 动态参数
配置一个包含动态重配置实用程序功能的基本节点。
- 创建配置文件 .cfg
#! /usr/bin/env python
PACKAGE = "demo01_pub_cli"# 初始化参数生成器
from dynamic_reconfigure.parameter_generator_catkin import *gen = ParameterGenerator()# 加入不同的参数类型并设置默认值、描述、范围等
"""gen.add()- name: 参数的名称- type: 参数值的类型- level: 一个传递给回调的位掩码- description: 描述- default: 节点启动时的默认值- min: 参数最小值- max: 参数最大值
"""
gen.add("double_param", double_t, 0, "A double parameter",.1, 0, 1)
gen.add("str_param", str_t, 0, "A string parameter", "Chapter2_dynamic_reconfigure")
gen.add("int_param", int_t, 0, "An Integer parameter", 1, 0, 100)
gen.add("bool_param", bool_t, 0, "A Boolean parameter", True)size_enum = gen.enum([gen.const("Low", int_t, 0, "Low is 0"),gen.const("Medium", int_t, 1, "Medium is 1"),gen.const("High", int_t, 2, "High is 2")],"Select from the list")gen.add("size", int_t, 0, "Select from the list", 1, 0, 3, edit_method=size_enum)# 生成必要的文件并退出程序
exit(gen.generate(PACKAGE, "demo01_pub_cli", "chapter2_"))
- 修改执行文件的权限
chmod +x *.cfg
- 修改 CMakeList.txt 并编译
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generationdynamic_reconfigure
)generate_dynamic_reconfigure_options(cfg/chapter2.cfg
)add_dependencies(example4 demo01_pub_cli_gencfg)
- 写具有动态重配置支持的新节点
#include <ros/ros.h>
#include <dynamic_reconfigure/server.h>
#include <demo01_pub_cli/chapter2_Config.h>// 参数访问的方式, 将输出参数的新值
void callback(demo01_pub_cli::chapter2_Config &config, uint32_t level) {ROS_INFO("Reconfigure Request: %d, %f, %s %s %d",config.int_param,config.double_param,config.str_param.c_str(),config.bool_param?"True":"False",config.size);}int main(int argc, char **argv)
{ros::init(argc, argv, "example4_dynamic_reconfigure");// 初始化服务器dynamic_reconfigure::Server<demo01_pub_cli::chapter2_Config> server;dynamic_reconfigure::Server<demo01_pub_cli::chapter2_Config>::CallbackType f;f = boost::bind(&callback, _1, _2);// 向服务器发送callback函数。当服务器得到重新配置请求时调用 callback 函数server.setCallback(f);ros::spin();return 0;
}
- 修改 CMakeLists.txt , 编译并运行节点和动态重配置 GUI
add_executable(example4 src/example4.cpp)
add_dependencies(example4 demo01_pub_cli_gencfg)
rosrun demo01_pub_cli example4
>>> [ INFO] [1700312052.497444818]: Reconfigure Request: 1, 0.100000, Chapter2_dynamic_reconfigure True 1
rosrun rqt_reconfigure rqt_reconfigure
>>> [ INFO] [1700312097.307494990]: Reconfigure Request: 42, 0.100000, Chapter2_dynamic_reconfigure True 1[ INFO] [1700312099.355379827]: Reconfigure Request: 42, 0.470000, Chapter2_dynamic_reconfigure True 1[ INFO] [1700312101.253127436]: Reconfigure Request: 73, 0.470000, Chapter2_dynamic_reconfigure True 1[ INFO] [1700312103.210104907]: Reconfigure Request: 73, 0.710000, Chapter2_dynamic_reconfigure True 1