网页微信版下载邢台市seo服务
一、参考资料
原始论文:[1]
PyTorch代码链接:Efficient-AI-Backbones
MindSpore代码:ghostnet_d
解读模型压缩5:减少冗余特征的Ghost模块:华为Ghost网络系列解读
GhostNet论文解析:Ghost Module
CVPR 2020:华为GhostNet,超越谷歌MobileNet,已开源
二、术语解析
廉价的线性变换/线性运算:cheap linear operations;
线性变换的线性内核:linear kernels;
深度可分离卷积:Depthwise Separable Convolution,DSConv;
逐深度卷积:Depthwise Convolution,DWConv;
逐点卷积:Pointwise Convolution,PWConv;
Ghost特征图:Ghost feature maps;
三、相关介绍
1. 廉价的线性变换
“廉价”指的是计算量小,计算成本低。
cheap operation 其实就是 group convolution,group number = input channel number,相当于DWConv操作。
2. 标准卷积层
关于标准卷积的详细介绍,请参考博客:
关于CNN卷积神经网络与Conv2D标准卷积的重要概念
CNN卷积神经网络模型的参数量、计算量计算方法(概念版)

给定输入特征图 X ∈ R h × w × c X\in\mathbb{R}^{h\times w \times c} X∈Rh×w×c,卷积核 f ∈ R c × k × k × n f\in\mathbb{R}^{c\times k\times k\times n} f∈Rc×k×k×n,通过标准卷积操作,输出特征图为 Y ∈ R h ′ × w ′ × n Y\in\mathbb{R}^{h^{\prime}\times w^{\prime}\times n} Y∈Rh′×w′×n,标准卷积过程可以表示为:
Y = X ∗ f + b , ( 1 ) Y=X*f+b,\quad(1) Y=X∗f+b,(1)
其中, ∗ * ∗ 是卷积运算, b b b 是偏置项。
标准卷积的FLOPs计算量为: n ⋅ h ′ ⋅ w ′ ⋅ c ⋅ k ⋅ k n\cdot h^{\prime}\cdot w^{\prime}\cdot c\cdot k\cdot k n⋅h′⋅w′⋅c⋅k⋅k。
四、GhostNetV1相关介绍
GhostNetV1 又称为 C-GhostNet,是针对CPU优化的轻量级神经网络。
1. 摘要
该论文提供了一个全新的Ghost Module,旨在通过廉价操作生成更多的特征图。基于一组原始的特征图,作者应用一系列廉价的线性变换(cheap linear operations),以很小的代价生成许多能从原始特征发掘所需信息的Ghost特征图。该Ghost模块即插即用,通过堆叠Ghost Module得出 Ghost bottleneck,进而搭建轻量级神经网络——GhostNet。在ImageNet分类任务,GhostNet在相似计算量情况下Top-1正确率达75.7%,高于MobileNetV3的75.2%。
2. 引言
深度卷积神经网络通常引用由大量卷积组成的卷积神经网络,导致大量的计算成本。尽管最近的工作,例如MobileNet和ShuffleNet引入DSConv或混洗操作(shuffle),以使用较小的卷积核(浮点运算)来构建有效的CNN,其余 1×1 卷积层仍将占用大量内存和FLOPs。
在深度卷积神经网络中,中间层的输出特征图通常会包含丰富甚至冗余的特征图,其中一些特征图可以通过对另一些特征图基于某种简单的操作变换获取,比如仿射变换和小波变换这些低成本的线性运算。如下图所示,在ResNet-50中,将经过第一个残差块处理后的特征图拿出来,三个相似的特征图对用相同颜色的框注释。 在一个特征图对中,其中一个特征图可以通过廉价操作(用扳手表示)将另一个特征图变换而获得,可以认为其中一个特征图是另一个的“幻影(Ghost)”。因为,本文提出并非所有特征图都要用卷积操作来得到,Ghost特征图可以使用廉价的操作来生成。

3. Ghost Module(GM)
利用Ghost Module生成与普通卷积层相同数量的特征图,我们可以轻松地将Ghost Module替换卷积层,集成到现有设计好的神经网络结构中,以减少计算成本。
3.1 Ghost Module原理
Ghost Module分为三步:
- 通过
DWConv,生成 m = n s m=\frac {n}{s} m=sn 个本征特征图; - 通过廉价的线性变换,生成 n = m ⋅ s n=m \cdot s n=m⋅s 个Ghost特征图;
- 拼接本征特征图和Ghost特征图。

上图中, I d e n t i t y Identity Identity 表示恒等映射, Φ k \Phi_k Φk 表示廉价的线性变换。
Step1:生成m个本征特征图(intrinsic feature maps)
首先,给定输入特征图 X ∈ R h × w × c X\in\mathbb{R}^{h\times w \times c} X∈Rh×w×c,PWConv 卷积核 f ′ ∈ R c × k × k × m f^{\prime}\in\mathbb{R}^{c\times k\times k\times m} f′∈Rc×k×k×m 的尺寸为 1 × 1 1 \times 1 1×1 ,通过 PWConv 操作,生成 m m m个本征特征图 Y ∈ R h × w × m Y\in\mathbb{R}^{h\times w\times m} Y∈Rh×w×m。 m ≤ n m\leq n m≤n,输入特征图与输出特征图的高和宽一致。为简单起见,这里省略偏置项,该过程可以表示为:
Y ′ = X ∗ f ′ , ( 2 ) Y^{\prime}=X*f',\quad(2) Y′=X∗f′,(2)
Step2:生成n个Ghost特征图
然后,将本征特征图 Y ′ Y^{\prime} Y′ 每一个通道的特征图 y i ′ y^{\prime}_i yi′,通过一系列廉价的线性变换 Φ i , j \Phi_{i,j} Φi,j ,以生成 s s s个Ghost特征图 y i j y_{ij} yij,公式表达如下:
y i j = Φ i , j ( y i ′ ) , ∀ i = 1 , . . . , m , j = 1 , . . . , s , ( 3 ) y_{ij}=\Phi_{i,j}(y^{\prime}_i),\quad \forall i=1,...,m,\quad j=1,...,s,\quad(3) yij=Φi,j(yi′),∀i=1,...,m,j=1,...,s,(3)
其中, y i ′ y^{\prime}_i yi′ 是 Y ′ Y^{\prime} Y′ 中第 i i i个原始特征图,上述函数中的 Φ i , j \Phi_{i,j} Φi,j 是第 j j j个线性变换,用于生成第 j j j个Ghost特征图 y i j y_{ij} yij。也就是说, y i ′ y^{\prime}_i yi′ 可以具有一个或多个Ghost特征图 { y i j } j = 1 s \{y_{ij}\}_{j=1}^{s} {yij}j=1s。最后的 Φ i , s \Phi_{i,s} Φi,s 是用于保留本征特征图的恒等映射。通过廉价的线性变换,生成 n = m ⋅ s n=m \cdot s n=m⋅s个Ghost特征图 Y = [ y 11 , y 12 , ⋯ , y m s ] Y=[y_{11},y_{12},\cdots,y_{ms}] Y=[y11,y12,⋯,yms]。
s s s为超参数,用于生成 m = n s m = \frac{n}{s} m=sn 个本征特征图。
Step3:拼接特征图
最后,将第一步得到的本征特征图和第二步得到的Ghost特征图拼接(identity连接),得到最终结果OutPut。公式表达如下:
Y = Concat ( [ Y ′ , Y ′ ∗ Φ i , j ] ) , Y=\operatorname{Concat}([Y',Y'*\Phi_{i,j}]), Y=Concat([Y′,Y′∗Φi,j]),

上图中, w ′ = w , h ′ = h w^{\prime} = w, h^{\prime} = h w′=w,h′=h。
3.2 Ghost Module与DSConv
关于深度可分离卷积的详细介绍,请参考另一篇博客:深入浅出理解深度可分离卷积(Depthwise Separable Convolution)
DSConv由DWConv和PWConv构成,使用 DWConv 处理空间信息,使用 PWConv 处理不同channel之间的信息。相比之下,Ghost Module先使用标准卷积得到一些特征,再使用廉价线性变换得到另一些特征。
从另一个角度看,Ghost Module 是对本征特征图做增强/增广,和数据增广有点相似。
3.3 Φ i , j \Phi_{i,j} Φi,j 线性变换:DWConv
论文中使用的廉价的线性变换并不是常见的旋转、平移、仿射变换(affine transformation)和小波变换(wavelet transformation),而是用的DWConv。 因为卷积是当前硬件已经很好支持的高效运算,它可以涵盖许多广泛使用的线性运算,例如平滑、模糊等。此外,线性变换的 linear kernels 大小为 d × d d\times d d×d, d d d 不一致会导致计算单元(例如CPU和GPU)的计算效率降低。所以,论文中== d d d 取固定值(例如全3x3或全5x5),并利用 DWConv 来实现 Φ i , j \Phi_{i,j} Φi,j==,以构建高效的深度神经网络。
3.4 Ghost Module计算量与参数量
Ghost Module具有1个恒等映射(identity mapping)和 m ⋅ ( s − 1 ) = n s ⋅ ( s − 1 ) m\cdot(s-1)=\frac{n}{s}\cdot(s-1) m⋅(s−1)=sn⋅(s−1) 个线性变换。进行1个恒等映射,生成 m m m个本征特征图,进行 m ⋅ ( s − 1 ) m\cdot(s-1) m⋅(s−1) 个线性变换,生成 n n n个Ghost特征图。
解释说明:
n − m = m × s − m = m × ( s − 1 ) = n s ⋅ ( s − 1 ) n-m=m \times s - m = m \times (s-1) =\frac{n}{s}\cdot(s-1) n−m=m×s−m=m×(s−1)=sn⋅(s−1)
每个线性变换的 linear kernels 大小为 d × d d \times d d×d,其中 d d d 为超参数。
Ghost Module与标准卷积的计算量加速比为:
r s = n ⋅ h ′ ⋅ w ′ ⋅ c ⋅ k ⋅ k n s ⋅ h ′ ⋅ w ′ ⋅ c ⋅ k ⋅ k + ( s − 1 ) ⋅ n s ⋅ h ′ ⋅ w ′ ⋅ d ⋅ d = c ⋅ k ⋅ k 1 s ⋅ c ⋅ k ⋅ k + s − 1 s ⋅ d ⋅ d ≈ s ⋅ c s + c − 1 ≈ s . ( 4 ) \begin{gathered} r_{s} =\frac{n\cdot h^{\prime}\cdot w^{\prime}\cdot c\cdot k\cdot k}{\frac ns\cdot h^{\prime}\cdot w^{\prime}\cdot c\cdot k\cdot k+(s-1)\cdot\frac ns\cdot h^{\prime}\cdot w^{\prime}\cdot d\cdot d} \\ =\frac{c\cdot k\cdot k}{\frac1s\cdot c\cdot k\cdot k+\frac{s-1}s\cdot d\cdot d}\approx\frac{s\cdot c}{s+c-1}\approx s. \end{gathered}\quad (4) rs=sn⋅h′⋅w′⋅c⋅k⋅k+(s−1)⋅sn⋅h′⋅w′⋅d⋅dn⋅h′⋅w′⋅c⋅k⋅k=s1⋅c⋅k⋅k+ss−1⋅d⋅dc⋅k⋅k≈s+c−1s⋅c≈s.(4)
其中, d × d d \times d d×d 的幅度与 k × k k \times k k×k 和 s ≪ c s\ll c s≪c 相似。
Ghost Module与标准卷积的参数量压缩比为:
r c = n ⋅ c ⋅ k ⋅ k n s ⋅ c ⋅ k ⋅ k + ( s − 1 ) ⋅ n s ⋅ d ⋅ d ≈ s ⋅ c s + c − 1 ≈ s . ( 5 ) \begin{aligned}r_c&=\frac{n\cdot c\cdot k\cdot k}{\frac{n}{s}\cdot c\cdot k\cdot k+(s-1)\cdot\frac{n}{s}\cdot d\cdot d}\approx\frac{s\cdot c}{s+c-1}\approx s.\end{aligned} \quad (5) rc=sn⋅c⋅k⋅k+(s−1)⋅sn⋅d⋅dn⋅c⋅k⋅k≈s+c−1s⋅c≈s.(5)
3.5 Ghost Module消融实验
如上所述,Ghost Module有两个超参数:
- s s s用于生成 m = n s m=\frac {n}{s} m=sn 个本征特征图;
- 用于计算Ghost特征图的线性变换的
linear kernels尺寸 d × d d \times d d×d,即DWConv的卷积核。
作者测试了这两个超参数对模型精度的影响。首先,作者固定 s = 2 s=2 s=2,并在 { 1 , 3 , 5 , 7 } \{1, 3, 5, 7\} {1,3,5,7} 范围中调整 d d d,在CIFIAR-10数据集上测试结果如下表所示:

从上表中可以看出,当 d = 3 d=3 d=3 时,Ghost Module 的性能优于更小或更大的 Ghost Module。这是因为大小为 1 × 1 1 \times 1 1×1 的卷积核无法在特征图上引入空间信息,而较大的 linear kernels(例如 d = 5 d=5 d=5或 d = 7 d=7 d=7)会导致过拟合和更多计算量。因此,在以下实验中,作者采用 d = 3 d=3 d=3 来提高有效性和效率。
在研究了 linear kernels 大小的影响后,作者固定 d = 3 d=3 d=3,并在 { 2 , 3 , 4 , 5 } \{2, 3, 4, 5\} {2,3,4,5} 的范围内调整超参数 s s s。实际上, s s s 与计算成本直接相关,也即较大的 s s s导致较大的计算量加速比和参数量压缩比。实验结果如下表所示:

从上表中可以看出,当增加 s s s时,FLOPs显著减少,且准确率逐渐降低,这是预期内的结果。特别的,当 s = 2 s=2 s=2 时,也就是将VGG-16压缩 2 × 2 \times 2× 时,Ghost Module的性能甚至比原始模型更好,表明所提出的Ghost Module的优越性。
3.6 (PyTorch)代码实现
class GhostModule(nn.Module):def __init__(self, inp, oup, kernel_size=1, ratio=2, dw_size=3, stride=1, relu=True):super(GhostModule, self).__init__()self.oup = oupinit_channels = math.ceil(oup / ratio)new_channels = init_channels*(ratio-1)self.primary_conv = nn.Sequential(nn.Conv2d(inp, init_channels, kernel_size, stride, kernel_size//2, bias=False),nn.BatchNorm2d(init_channels),nn.ReLU(inplace=True) if relu else nn.Sequential(),)# Depthwiseconvself.cheap_operation = nn.Sequential(nn.Conv2d(init_channels, new_channels, dw_size, 1, dw_size//2, groups=init_channels, bias=False),nn.BatchNorm2d(new_channels),nn.ReLU(inplace=True) if relu else nn.Sequential(),)def forward(self, x):x1 = self.primary_conv(x)x2 = self.cheap_operation(x1)out = torch.cat([x1,x2], dim=1)return out[:,:self.oup,:,:]
3.7 (Paddle)代码实现
# 复现恒等映射和线性变换的特征融合import paddle
from paddle.fluid.layers.nn import transpose
import paddle.nn as nn
import math
import paddle.nn.functional as Fclass DWConv3x3BNReLU(nn.Sequential):def __init__(self, in_channel, out_channel, stride, groups):super(DWConv3x3BNReLU, self).__init__(nn.Conv2D(in_channels=in_channel, out_channels=out_channel, kernel_size=3, stride=stride, padding=1, groups=groups, bias_attr=False),nn.BatchNorm2D(out_channel),nn.ReLU6(),)class GhostModule(nn.Layer):def __init__(self, in_channels, out_channels, s=2, kernel_size=1, stride=1, use_relu=True):super(GhostModule, self).__init__()intrinsic_channel = out_channels // sghost_channel = intrinsic_channel * (s - 1)self.primary_conv = nn.Sequential(nn.Conv2D(in_channels=in_channels, out_channels=intrinsic_channel, kernel_size=kernel_size, stride=stride, padding=(kernel_size-1)//2, bias_attr =False),nn.BatchNorm2D(intrinsic_channel),nn.ReLU() if use_relu else nn.Sequential())self.cheap_op = DWConv3x3BNReLU(in_channel=intrinsic_channel, out_channel=ghost_channel, stride=stride, groups=intrinsic_channel)def forward(self, x):x1 = self.primary_conv(x)x2 = self.cheap_op(x1)out = paddle.concat([x1, x2], axis=1)return out
4. Ghost bottleneck(G-bneck)
4.1 Ghost bottleneck结构
Ghost bottleneck与ResNet中的基本残差块(Basic Residual Block)结构相似,可以认为是将 Basic Residual Block 中的卷积操作用 Ghost Module 替换得到。
Ghost bottleneck主要由两个堆叠的Ghost Module组成。第一个Ghost Module用于增加通道数。第二个Ghost Module用于减少通道数,以与shortcut路径匹配。然后,使用shortcut连接这两个Ghost Module的输入和输出。这里借鉴了MobileNetV2,第二个Ghost Module之后不使用ReLU激活函数,其他层在每层之后都应用了批量归一化(BN)和ReLU非线性激活。作者设计了2种Ghost bottleneck。如下图所示,分别对应着 stride=1 和 stride=2 的情况。Ghost bottleNeck结构如下图所示:

左图中,stride=1,主干通路用两个 Ghost Module 串联组成,其中第一个Ghost Module扩大通道数,第二个Ghost Module将通道数降低到与输入通道数一致。
右图中,stride=2,与左图的不同之处在于,主干通路的两个 Ghost Module 之间加入了一个 stride=2 的 DWConv,可以将特征图大小降为输入特征图的 1 2 \frac {1}{2} 21,且跳跃连接通路也需要同样的降采样,以保证Add操作可以对齐。这个模块可以用来替换其他CNN中的下采样层(1/2)。
出于效率考虑,Ghost Module中的所有标准卷积都用PWConv代替。
4.2 (PyTorch)代码实现
class GhostBottleneck(nn.Module):def __init__(self, inp, hidden_dim, oup, kernel_size, stride, use_se):super(GhostBottleneck, self).__init__()assert stride in [1, 2]self.conv = nn.Sequential(# PointwiseConvGhostModule(inp, hidden_dim, kernel_size=1, relu=True),# DepthwiseConvdepthwise_conv(hidden_dim, hidden_dim, kernel_size, stride, relu=False) if stride==2 else nn.Sequential(),# Squeeze-and-ExciteSELayer(hidden_dim) if use_se else nn.Sequential(),# pw-linearGhostModule(hidden_dim, oup, kernel_size=1, relu=False),)if stride == 1 and inp == oup:self.shortcut = nn.Sequential()else:self.shortcut = nn.Sequential(# DepthwiseConvdepthwise_conv(inp, inp, 3, stride, relu=True),nn.Conv2d(inp, oup, 1, 1, 0, bias=False),nn.BatchNorm2d(oup),)def forward(self, x):return self.conv(x) + self.shortcut(x)
5. GhostNetV1
5.1 MobileNetV3结构
关于MobileNet网络模型的详细介绍,请参考另一篇博客:通俗易懂理解MobileNet网络模型

5.2 GhostNetV1结构
基于MobileNetV3网络结构的优势,作者使用 Ghost bottleneck 替换MobileNetV3中的bottleneck。基于Ghost bottleneck,作者提出GhostNet。
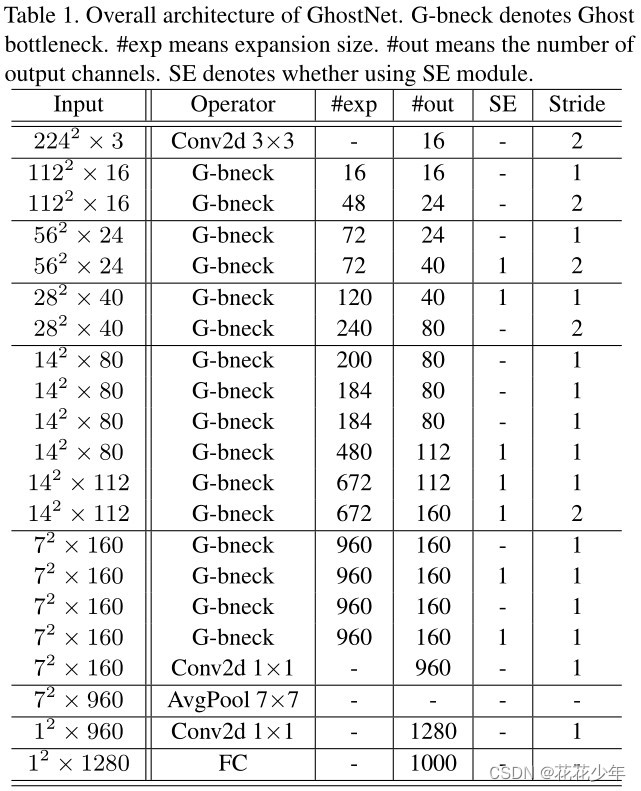
GhostNet主要由一堆Ghost bottleneck组成,其中Ghost bottleneck以Ghost Module为基础。第一层是具有16个卷积核的标准卷积层,然后是一系列Ghost bottleneck,通道逐渐增加。这些Ghost bottleneck根据其输入特征图的尺寸大小分为不同的阶段(stage)。除了每个阶段的最后一个Ghost bottleneck是stride = 2,其他所有Ghost bottleneck都以stride = 1。最后,利用全局平均池化和卷积层将特征图转换为1280维特征向量以进行最终分类。SE模块用在某些Ghost bottleneck中的残差层。与MobileNetV3相比,这里用ReLU换掉了Hard-swish激活函数。GhostNet 网络结构如下表所示。
解释说明
-
#exp,表示expansion ratio,将输出通道数与输入通道数之比称为expansion ratio; -
#out,表示output channels; -
SE,表示是否使用SE模块; -
Stride,表示stride。
五、参考文献
[1] Han K, Wang Y, Tian Q, et al. Ghostnet: More features from cheap operations[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020: 1580-1589.