网站建设 域名 数据库建站网站关键词优化
一、背景
实验室有两个kinova mico机械臂,但经常出现操纵杆上的绿色灯一闪一闪的,导致无法使用操纵杆或ROS进行控制,下面给出官方的教程以及所需要的FS 0CPP 0008_6.2.5_mico_6dof.hex文件。
重要的东西写在前面:
a、如果出现操纵杆上的绿色灯一闪一闪的问题,先尝试断开所有连接线,重新启动机械臂,如果不行,再尝试刷机,因为刷机还是有些麻烦的。
b、刷机可以直接在windows系统下
c、文件路径:D:\DLUT\manipulator programming\kinovaResources
d、切记:文件夹路径不要出现中文,防止更新固件时失败
二、解决kinova机械臂灯一闪一闪问题
1、下载最新版本的DevelopmentCenter
网址:https://www.kinovarobotics.com/product/gen2-robots
选择 Gen2 SDK v1.5.1
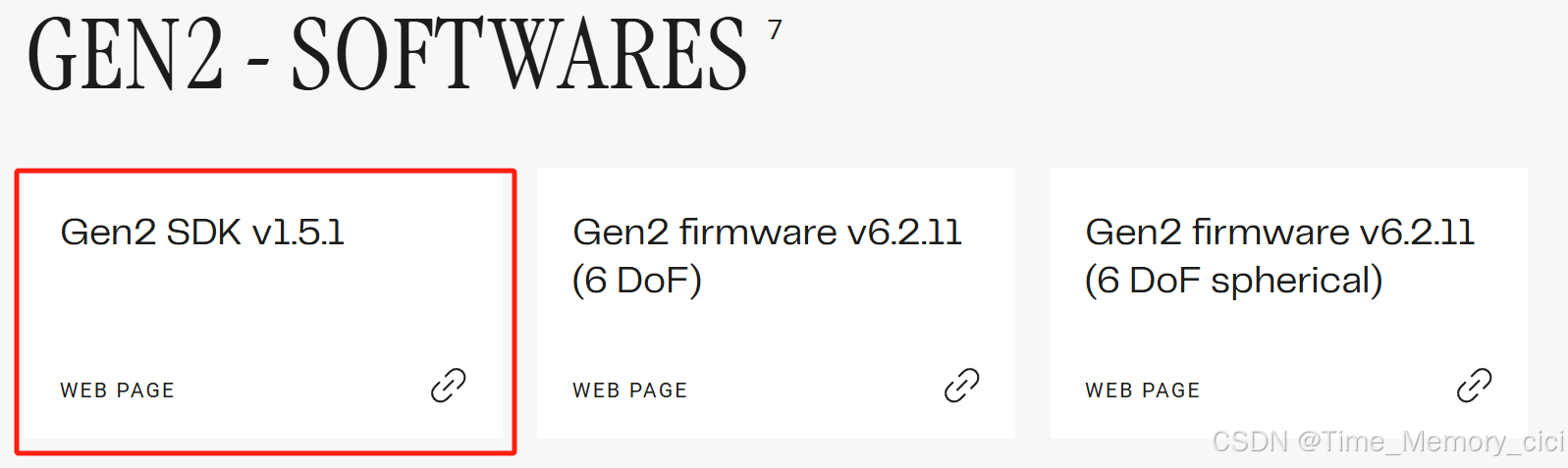
下载的文件为:PS 0000 0009_1.5.1.zip
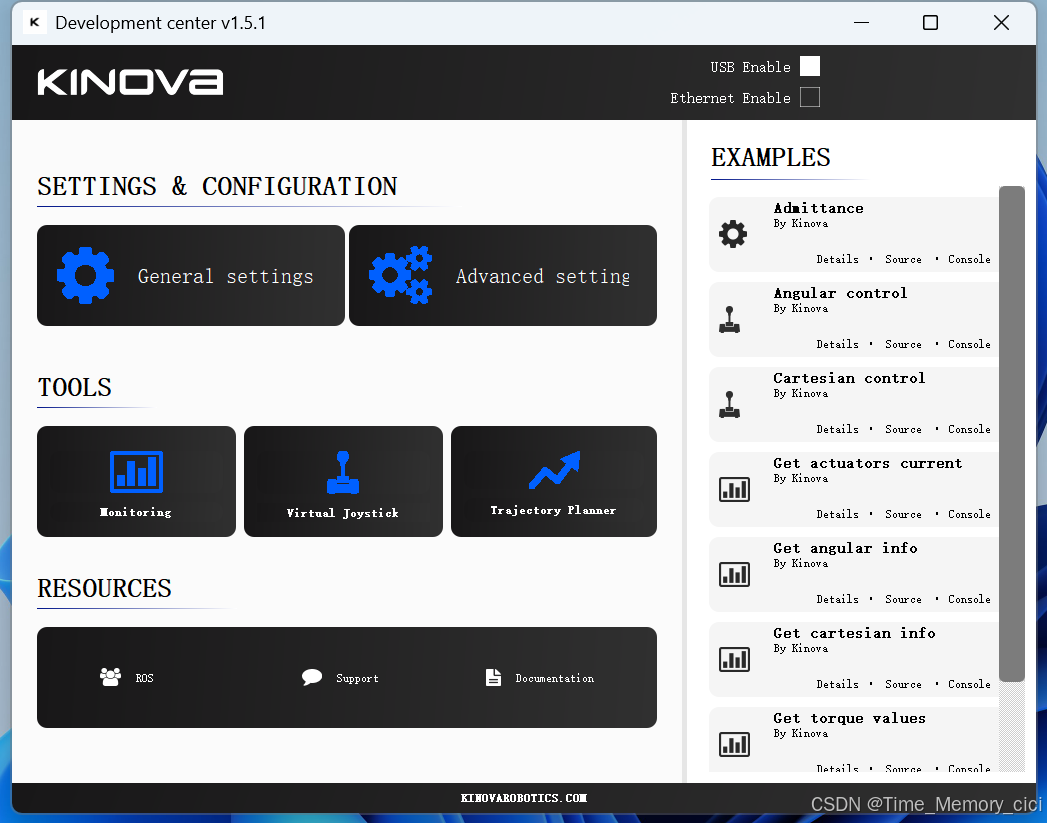
解压后,点击windows文件夹下的SDK_GEN2_1_5_1_x86.exe,然后就可成功安装DevelopmentCenter以及TorqueConsole,虽然用不到TorqueConsole。

2、关闭机械臂电源并使操纵杆连接器中的2个引脚短路

随便找个铜线、铝线都可以,只要能导电就行,我从实验室剪了一段铜线接上去了~~

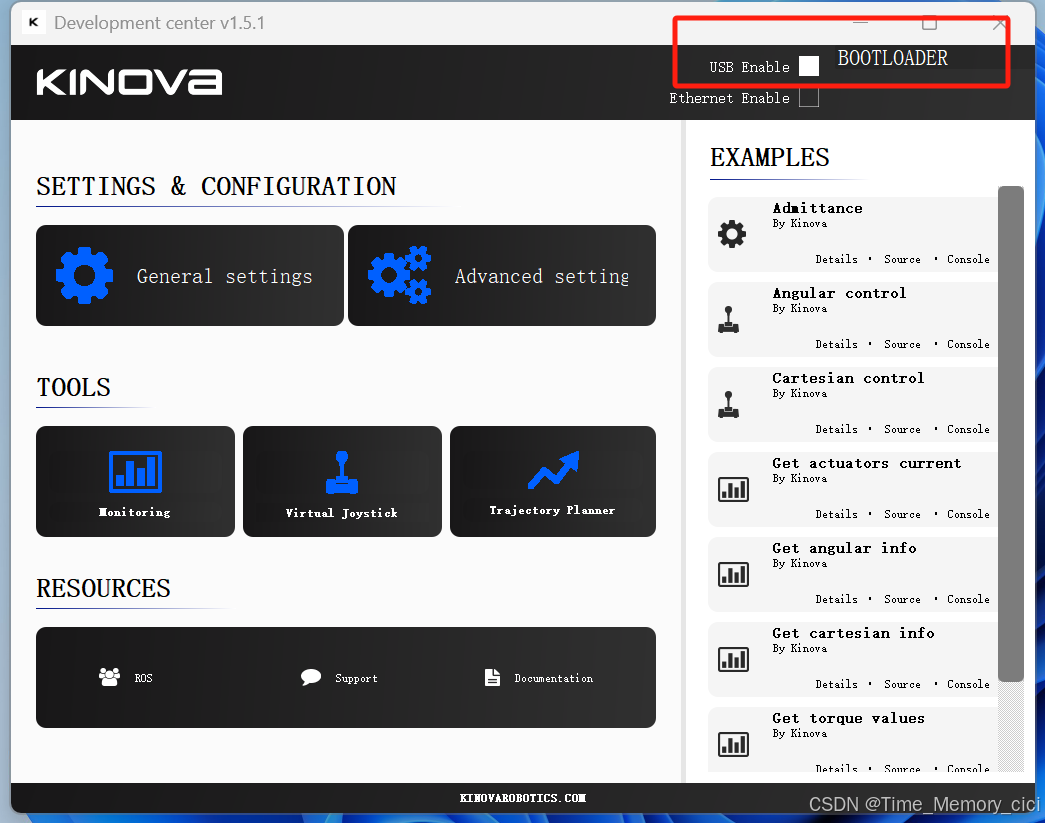
3、通过USB将机械臂和电脑相连,打开机械臂电源并启动DevelopmentCenter。
·在DevelopmentCenter右上角,应显示“BOOTLOADER”字样。
·单击“General settings”并转到“update”选项卡。
·点击“Browse”,找到FS 0CPP 0008_6.2.5_mico_6dof.hex文件,我的.hex文件路径为:D:\DLUT\manipulator programming\kinovaResources
·单击update(此步骤最多需要2分钟)
·更新完成后,提示Firmware Update completed successfully,关闭机械臂电源,并移除操纵杆引脚的短路。
·机械臂上电,此时操纵杆的绿色等不再闪烁,问题成功解决,完美!!!

三、资料记录
1、hex文件移动硬盘有备份,文件路径为:F:\2联想R7000\DLUT\机械臂\kinova\FS 0CPP 0008_6.2.5_mico_6dof.hex
2、祖传解决kinova一闪一闪解决办法:
Kinova GEN 2 MICO机械臂一闪一闪的解决办法:
1. 备注:(刷机失败可能的原因)1.hex文件路径为中文;2.Develpment Center可能不是最新版本,官网下载如下图所示2. 然后安装 “Development Center” (SDK_GEN2_1_5_1_x86.exe),链接https://www.kinovarobotics.com/en/resources/technical-resources-library 。待完成后,如果usb驱动没问题,直接跳转到步骤5,否则从SDK 1.5.1中找到 (步骤3中提到的usb驱动包)重新安装
3. 下载机械臂的usb驱动包,Kinova-Jaco-Usb-Driver-(usblib)-Installer.exe
4. 安装上面的usb驱动包
5. 按照Development center说明书操作(两个口pin短路),->Update->Browse->添加hex文件,最后Update一下,等2分钟
3、kinova管网刷机教程:
You are facing a boot loader issue since you cannot control the arm with either the joystick or ROS and the green lights are flashing on your jostick.
You will need the latest version of Development Center available on our website. Here is the link:
https://www.kinovarobotics.com/en/knowledge-hub/all-kinova-products
and choose "KINOVA® SDK GEN 2 Ultra lightweight robot 1.5.1".
Follow the release notes (RN) document to install the software properly.
Power-down the arm and short-circuit the 2 pins in the joystick connector as shown in the picture below.Connect the arm to the computer via USB, power-on the arm and launch Development Center.
· In the top right corner, the mention "BOOTLOADER" should be displayed.
· Click on General Settings and go to the Update tab.
· Click on Browse and choose the firmware version attached below for your mico 6DOF robot that you can download with this link
· Click on Update (this step can take up to 2 minutes)
· Once the update is completed, power down the arm and remove the short circuit from the joystick pins.
· Power on the arm.
You should now be able to control the arm using the joystick. Now please make sure the developement center is closed and try to do the following two commands in your terminal :
1)roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=m1n6s300
2)roslaunch m1n6s300_moveit_config m1n6s300_demo.launch
If there is still an error when you launch one of these two commands please let me know and I will help you :)