服装网站建设的目的无线新闻台直播app下载
本文是看了DeepSORT方法视频之后,关于其中使用的卡尔曼滤波的理解
DeepSORT视频链接
首先贴几个比较好的,与本文由有关的几个帖子
图说卡尔曼滤波,一份通俗易懂的教程
卡尔曼滤波(Kalman Filter)原理与公式推导
卡尔曼滤波:从入门到精通
协方差的计算:X,Y是随机变量,A,B是常数矩阵,如何证明cov(AX,BY)=Acov(X,Y)B’?
协方差的计算方法
矩阵求导
两个高斯分布乘积的理论推导
首先是视频中的一张图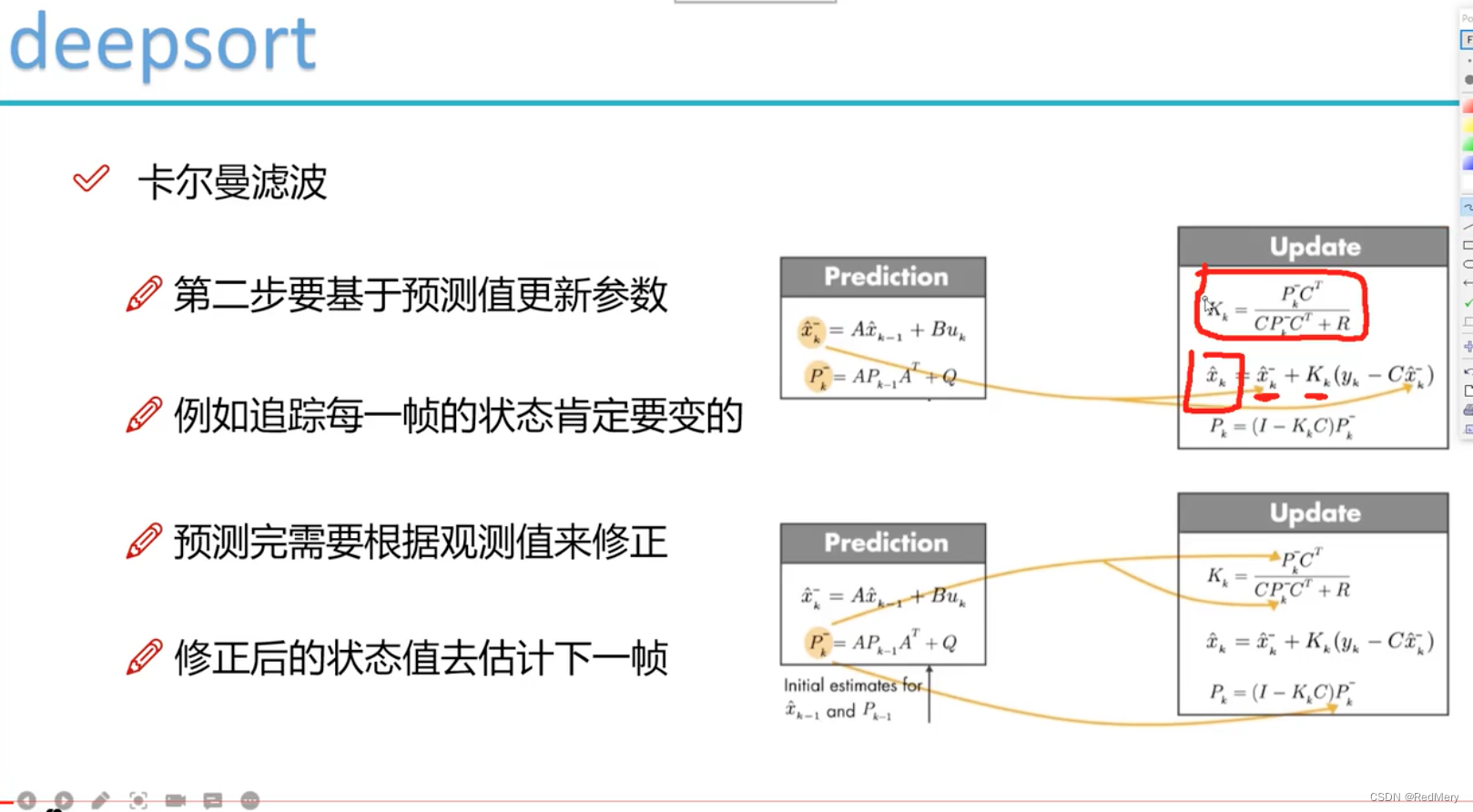
预测阶段
x ^ k − = A x ^ k − 1 \hat{x}_k^-=A\hat{x}_{k-1} x^k−=Ax^k−1
P k − = A P k − 1 A T + Q , P k − ∈ R 8 , 8 P_k^-=AP_{k-1}A^T+Q, P_k^- \in R^{8,8} Pk−=APk−1AT+Q,Pk−∈R8,8
更新阶段
K k = P k − C T C P k − C T + R , K k ∈ R 8 , 4 K_k=\frac{P_k^-C^T}{CP_k^-C^T+R}, K_k\in R^{8,4} Kk=CPk−CT+RPk−CT,Kk∈R8,4
x k ^ = x ^ k − + K k ( y k − C x ^ k − ) , C ∈ R 4 , 8 , x ^ k − ∈ R 8 , 1 , y k ∈ R 4 , 1 \hat{x_k}=\hat{x}_k^-+K_k(y_k-C\hat{x}_k^-), C\in R^{4,8}, \hat{x}_k^-\in R^{8,1}, y_k\in R^{4,1} xk^=x^k−+Kk(yk−Cx^k−),C∈R4,8,x^k−∈R8,1,yk∈R4,1
P k = ( I − K k C ) P k − P_k=(I-K_kC)P_k^- Pk=(I−KkC)Pk−
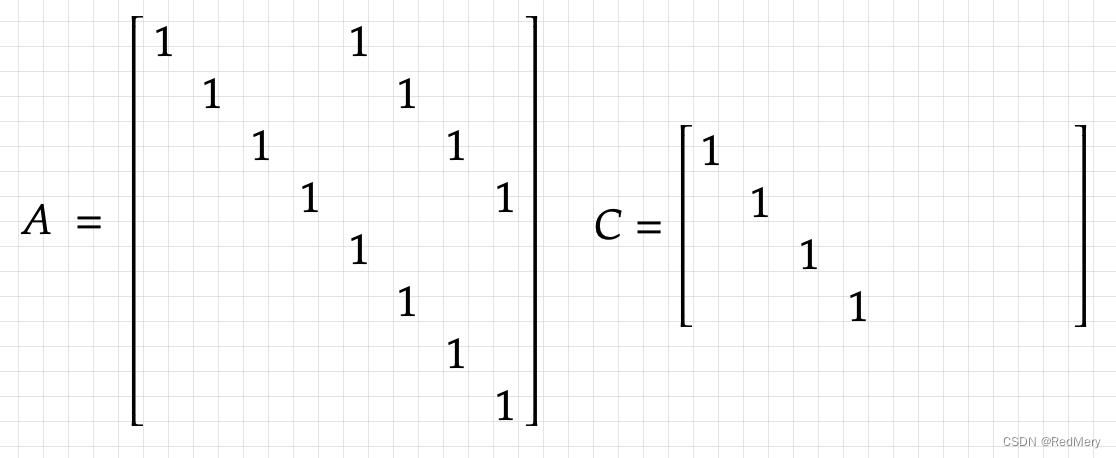
整个过程中,矩阵A和矩阵C保持不变,具体如下所示。C是状态观测矩阵,比如,如果我们现在的观测值是速度,而需要的是位置,那么C就是由速度变化到位置的变换矩阵。而在这里,C是由检测框变换到检测框的变换矩阵,因此C里都是1
 详细步骤:
详细步骤:
1.获得第一帧输出的检测框参数初始化
x ^ k − \hat{x}_k^- x^k−和 P k − P_k^- Pk−首先被初始化
x ^ 0 − = [ x , y , r , h , 0 , 0 , 0 , 0 ] , ∈ R 1 , 8 \hat{x}_0^-=[x,y,r,h,0,0,0,0], \in R^{1,8} x^0−=[x,y,r,h,0,0,0,0],∈R1,8
P k − P_k^- Pk−与 x ^ 0 − , ∈ R 8 , 8 \hat{x}_0^-, \in R^{8,8} x^0−,∈R8,8 有关,差了一个系数,代码如下所示
# self._std_weight_position = 0.05
# self._std_weight_velocity = 0.00625
std = [2 * self._std_weight_position * measurement[3], #2 * self._std_weight_position * measurement[3], 1e-2, 2 * self._std_weight_position * measurement[3], 10 * self._std_weight_velocity * measurement[3], 10 * self._std_weight_velocity * measurement[3], 1e-5, 10 * self._std_weight_velocity * measurement[3]]
covariance = np.diag(np.square(std))
2.预测下一时刻(第二帧中检测框的位置,图中的Prediction过程)
x ^ k − \hat{x}_k^- x^k−正常计算,
P k − 中的 Q P_k^-中的 Q Pk−中的Q是一个随机噪声,其为
std_pos = [ self._std_weight_position * mean[3], self._std_weight_position * mean[3], 1e-2, self._std_weight_position * mean[3]] std_vel = [self._std_weight_velocity * mean[3], self._std_weight_velocity * mean[3], 1e-5, self._std_weight_velocity * mean[3]] motion_cov = np.diag(np.square(np.r_[std_pos, std_vel])) mean = np.dot(self._motion_mat, mean)covariance = np.linalg.multi_dot(( self._motion_mat, covariance, self._motion_mat.T)) + motion_cov
3.完成配对,给每一个轨迹匹配一个检测框
4.更新过程(Update)
def project(self, mean, covariance): """Project state distribution to measurement space. Parameters ---------- mean : ndarray The state's mean vector (8 dimensional array). covariance : ndarray The state's covariance matrix (8x8 dimensional). Returns ------- (ndarray, ndarray) Returns the projected mean and covariance matrix of the given state estimate. """ std = [ self._std_weight_position * mean[3], self._std_weight_position * mean[3], 1e-1, self._std_weight_position * mean[3]] innovation_cov = np.diag(np.square(std)) mean = np.dot(self._update_mat, mean) covariance = np.linalg.multi_dot(( self._update_mat, covariance, self._update_mat.T)) return mean, covariance + innovation_covdef update(self, mean, covariance, measurement): """Run Kalman filter correction step. Parameters ---------- mean : ndarray The predicted state's mean vector (8 dimensional). covariance : ndarray The state's covariance matrix (8x8 dimensional). measurement : ndarray The 4 dimensional measurement vector (x, y, a, h), where (x, y) is the center position, a the aspect ratio, and h the height of the bounding box. Returns ------- (ndarray, ndarray) Returns the measurement-corrected state distribution. """ projected_mean, projected_cov = self.project(mean, covariance) #求解AX=b中的xchol_factor, lower = scipy.linalg.cho_factor(projected_cov, lower=True, check_finite=False) kalman_gain = scipy.linalg.cho_solve((chol_factor,lower), np.dot(covariance, self._update_mat.T).T, check_finite=False).T innovation = measurement - projected_mean new_mean = mean + np.dot(innovation, kalman_gain.T) new_covariance = covariance - np.linalg.multi_dot(( kalman_gain, projected_cov, kalman_gain.T)) return new_mean, new_covariance
本文在卡尔曼滤波:从入门到精通的基础上,又添加了一些个人的理解
导论
卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。事实上,卡尔曼滤波是将两个高斯分布相乘而得到的一个新的高斯分布。
简述
首先考虑一个SLAM问题
- 运动方程: x t = F t ⋅ x t − 1 + B t ⋅ u t + ω t (1) x_t=F_t \cdot x_{t-1}+B_t\cdot u_t+\omega_t \tag{1} xt=Ft⋅xt−1+Bt⋅ut+ωt(1)
- 观测方程: z t = H t ⋅ x t + v t (2) z_t=H_t \cdot x_t+v_t \tag{2} zt=Ht⋅xt+vt(2)
其中:
x t x_t xt为 t t t 时刻的状态向量,包括了相机位姿、路标坐标等信息,也可能有速度、朝向等信息;
u t u_t ut为运动测量值,如加速度,转向等等;
F t F_t Ft为状态转换方程,将 t − 1 t-1 t−1 时刻的状态转换至 t t t 时刻的状态;
B t B_t Bt 是控制输入矩阵,将运动测量值 的作用映射到状态向量上;
ω t \omega_t ωt是预测的高斯噪声,其均值为0,协方差矩阵为 Q t Q_t Qt 。
z t z_t zt为传感器的测量值;
H t H_t Ht为转换矩阵,它将状态向量映射到测量值所在的空间中,由于估计值和预测值可能不同,单位也不同,因此需要 H t H_t Ht来进行变换。
v t v_t vt为测量的高斯噪声,其均值为0,协方差矩阵为 R t R_t Rt。
一个小例子:
用一个在解释卡尔曼滤波时最常用的一维例子:小车追踪。如下图所示:
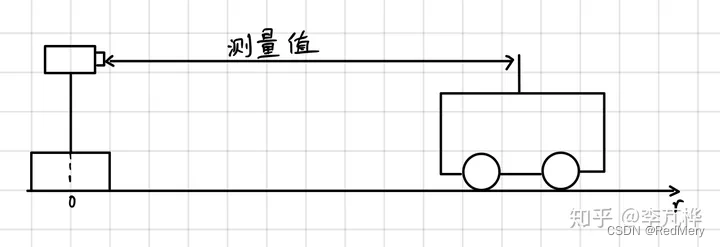
状态向量 x t x_t xt为小车的位置和速度:
x t = [ s t v t ] (3) x_t= \begin{bmatrix} s_t\\ v_t\\ \end{bmatrix} \tag{3} xt=[stvt](3)
其中, s t s_t st为t时刻的位移, v t v_t vt为t时刻的速度
{ s t = s t − 1 + v t ⋅ △ t + 1 2 ⋅ u t ⋅ △ t 2 v t = v t − 1 + u t ⋅ △ t (4) \begin{cases} s_t& =s_{t-1}+v_t\cdot \vartriangle t+\frac{1}{2}\cdot u_t\cdot \vartriangle t ^2\\ v_t& = v_{t-1} + u_t\cdot \vartriangle t \tag{4} \end{cases} {stvt=st−1+vt⋅△t+21⋅ut⋅△t2=vt−1+ut⋅△t(4)
写成矩阵的形式
[ s t v t ] = [ 1 △ t 0 1 ] [ s t − 1 v t − 1 ] + [ △ t 2 2 △ t ] ⋅ u t (5) \begin{bmatrix} s_t\\ v_t\\ \end{bmatrix}= \begin{bmatrix} 1&\vartriangle t\\ 0&1\\ \end{bmatrix} \begin{bmatrix} s_{t-1}\\ v_{t-1}\\ \end{bmatrix}+ \begin{bmatrix} \frac{\vartriangle t ^2}{2}\\ \vartriangle t\\ \end{bmatrix}\cdot u_t \tag{5} [stvt]=[10△t1][st−1vt−1]+[2△t2△t]⋅ut(5)
跟之前的运动方程对比,就知道
F t = [ 1 △ t 0 1 ] , B t = [ △ t 2 2 △ t ] F_t = \begin{bmatrix} 1&\vartriangle t\\ 0&1\\ \end{bmatrix},B_t= \begin{bmatrix} \frac{\vartriangle t ^2}{2}\\ \vartriangle t\\ \end{bmatrix} Ft=[10△t1],Bt=[2△t2△t]
上式就写为
x ^ t ∣ t − 1 = F t ⋅ x ^ t − 1 + B t ⋅ u t (6) \hat{x}_{t|t-1}=F_t\cdot\hat{x}_{t-1}+B_t\cdot u_t \tag{6} x^t∣t−1=Ft⋅x^t−1+Bt⋅ut(6)
与公式(1)的不同是,公式(1)中的值 x t x_t xt都是真实值,因此其中包含有误差,而公式(6)中的 x ^ t ∣ t − 1 \hat{x}_{t|t-1} x^t∣t−1是由运动学方程计算出来的,因此其中不包含误差。
联立公式(1)和(6)可得:
x t − x ^ t ∣ t − 1 = F ⋅ ( x t − 1 − x ^ t ∣ t − 1 ) + ω t x_t-\hat{x}_{t|t-1}=F\cdot (x_{t-1}-\hat{x}_{t|t-1})+\omega_t xt−x^t∣t−1=F⋅(xt−1−x^t∣t−1)+ωt
接下来计算真实值 x t x_t xt的协方差矩阵,首先明确一点矩阵 x t x_t xt是一个矩阵,它的形式如下所示:
x t = [ x 1 T , x 2 T , ⋯ , x n T ] = [ x 1 , 1 x 1 , 2 ⋯ x 1 , n − 1 x 1 , n x 2 , 1 x 2 , 2 ⋯ x 2 , n − 1 x 2 , n ⋮ ⋮ ⋮ ⋮ ⋮ x m , 1 x m , 2 ⋯ x 1 , m − 1 x 1 , m ] ∈ R m , n x_t=[x_1^T,x_2^T,\cdots,x_n^T]= \begin{bmatrix} x_{1,1}&x_{1,2}&\cdots&x_{1,n-1}&x_{1,n}\\ x_{2,1}&x_{2,2}&\cdots&x_{2,n-1}&x_{2,n}\\ \vdots&\vdots&\vdots&\vdots&\vdots\\ x_{m,1}&x_{m,2}&\cdots&x_{1,m-1}&x_{1,m}\\ \end{bmatrix}\in R^{m,n} xt=[x1T,x2T,⋯,xnT]= x1,1x2,1⋮xm,1x1,2x2,2⋮xm,2⋯⋯⋮⋯x1,n−1x2,n−1⋮x1,m−1x1,nx2,n⋮x1,m ∈Rm,n
也就是说 x t x_t xt中包含了n个状态量,并且每个状态量是一个m维向量,也就是存住了t个时刻的量。
还需要注意一点的是,且
x ^ t ∣ t − 1 \hat{x}_{t|t-1} x^t∣t−1为t时刻的状态矩阵 x t x_t xt 中不同状态量的均值。且
x ^ t ∣ t − 1 = [ m e a n ( x 1 ) m e a n ( x 2 ) ⋮ m e a n ( x n ) ] \hat{x}_{t|t-1}= \begin{bmatrix} mean(x_1)\\ mean(x_2)\\ \vdots\\ mean(x_n)\\ \end{bmatrix} x^t∣t−1= mean(x1)mean(x2)⋮mean(xn)
这也好理解,因为 x t x_t xt中应当是真实值,但是真实值事实上永远不可能知道的。不过呢,真实值的均值可以通过计算 x ^ t ∣ t − 1 \hat{x}_{t|t-1} x^t∣t−1得到,并且在均值的附近有误差,也就是一个在均值附近是一个高斯分布。那么接下来求矩阵 x t x_t xt的协方差矩阵就好理解了。
P t ∣ t − 1 = E [ ( x t − x ^ t ∣ t − 1 ) ( x t − x ^ t ∣ t − 1 ) T ] = E [ ( F ( x t − x ^ t ∣ t − 1 ) + ω t ) ⋅ ( F ( x t − x ^ t ∣ t − 1 ) + ω t ) T ] = F E [ ( x t − x ^ t ∣ t − 1 ) ⋅ ( x t − x ^ t ∣ t − 1 ) T ] F T + E [ F ( x t − x ^ t ∣ t − 1 ) ⋅ ω t T ] + E [ ω t ⋅ ( F ( x t − x ^ t ∣ t − 1 ) ) T ] + E [ ω t ⋅ ω t T ] \begin{equation} \begin{aligned} P_{t|t-1}&=E[(x_t-\hat{x}_{t|t-1})(x_t-\hat{x}_{t|t-1})^T] \\ & = E[(F(x_t-\hat{x}_{t|t-1})+\omega_t)\cdot (F(x_t-\hat{x}_{t|t-1})+\omega_t)^T] \\ & =FE[(x_t-\hat{x}_{t|t-1})\cdot (x_t-\hat{x}_{t|t-1})^T]F^T\\ &+E[F(x_t-\hat{x}_{t|t-1})\cdot \omega_t^T]+E[\omega_t\cdot (F(x_t-\hat{x}_{t|t-1}))^T] \\ &+E[\omega_t \cdot \omega_t^T] \end{aligned} \tag{} \end{equation} Pt∣t−1=E[(xt−x^t∣t−1)(xt−x^t∣t−1)T]=E[(F(xt−x^t∣t−1)+ωt)⋅(F(xt−x^t∣t−1)+ωt)T]=FE[(xt−x^t∣t−1)⋅(xt−x^t∣t−1)T]FT+E[F(xt−x^t∣t−1)⋅ωtT]+E[ωt⋅(F(xt−x^t∣t−1))T]+E[ωt⋅ωtT]()
其中 E [ F ( x t − x ^ t ∣ t − 1 ) ⋅ ω t T ] E[F(x_t-\hat{x}_{t|t-1})\cdot \omega_t^T] E[F(xt−x^t∣t−1)⋅ωtT]表示矩阵 F ( x t − x ^ t ∣ t − 1 ) F(x_t-\hat{x}_{t|t-1}) F(xt−x^t∣t−1) 与 ω t T \omega_t^T ωtT矩阵的协方差,且由于这两者这件并无关系,所以
E [ F ( x t − x ^ t ∣ t − 1 ) ⋅ ω t T ] = 0 E[F(x_t-\hat{x}_{t|t-1})\cdot \omega_t^T] =0 E[F(xt−x^t∣t−1)⋅ωtT]=0同理
E [ ω t ⋅ ( F ( x t − x ^ t ∣ t − 1 ) ) T ] = 0 E[\omega_t\cdot (F(x_t-\hat{x}_{t|t-1}))^T]=0 E[ωt⋅(F(xt−x^t∣t−1))T]=0
注意公式中的E表示的是期望,这里是由于协方差的计算方式不同,在matlab中的计算公式课本上的有所不同,这里知道就可以了。
因此就可以得到协方差的预测公式
P t ∣ t − 1 = F E [ ( x t − x ^ t ∣ t − 1 ) ⋅ ( x t − x ^ t ∣ t − 1 ) T ] F + E [ ω t ⋅ ω t T ] = F P t − 1 F T + Q t \begin{equation} \begin{aligned} P_{t|t-1}& =FE[(x_t-\hat{x}_{t|t-1})\cdot (x_t-\hat{x}_{t|t-1})^T]F+E[\omega_t \cdot \omega_t^T]\\ &=FP_{t-1}F^T+Q_t \end{aligned} \tag{} \end{equation} Pt∣t−1=FE[(xt−x^t∣t−1)⋅(xt−x^t∣t−1)T]F+E[ωt⋅ωtT]=FPt−1FT+Qt()
由以上的步骤,我们就得到了预测值和预测值的协方差矩阵,接下来就需要将预测值与观测值进行融合了。由于预测值是符合高斯分布,观测值也符合高斯分布,那么融合的本质就是将这个两个高斯分布乘起来,乘起来还是一个高斯分布,那么乘起来之后的高斯分布的均值和方差的公式推导,见帖子两个高斯分布乘积的理论推导
现在我们有n个预测量,假设有k个观测量为
x t − x ^ t ∣ t − 1 = F ⋅ ( x t − 1 − x ^ t ∣ t − 1 ) + ω t x_t-\hat{x}_{t|t-1}=F\cdot (x_{t-1}-\hat{x}_{t|t-1})+\omega_t xt−x^t∣t−1=F⋅(xt−1−x^t∣t−1)+ωt
接下来计算真实值 x t x_t xt的协方差矩阵,首先明确一点矩阵 x t x_t xt是一个矩阵,它的形式如下所示:
z t = [ z 1 z 2 ⋮ z n ] z_t= \begin{bmatrix} z_1\\ z_2\\ \vdots\\ z_n\\ \end{bmatrix} zt= z1z2⋮zn
x t x_t xt与 z t z_t zt 之间由于单位不同,因此需要使用一个转化矩阵H,即
z t = H ⋅ x t z_t=H\cdot x_t zt=H⋅xt写成矩阵形式就是
[ z 1 z 2 ⋮ z k ] = H ⋅ [ x 1 x 2 ⋮ x n ] \begin{bmatrix} z_1\\ z_2\\ \vdots\\ z_k\\ \end{bmatrix}= H\cdot \begin{bmatrix} x_{1}\\ x_{2}\\ \vdots\\ x_{n}\\ \end{bmatrix} z1z2⋮zk =H⋅ x1x2⋮xn