淘宝上做网站排名靠谱吗百度搜索图片
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
使用WiFi测量仪进行机器人定位的粒子滤波器研究旨在利用WiFi信号测量数据实现机器人的定位。
1. 研究背景:在室内环境中,GPS信号通常不可靠或者无法接收到。为了在这种情况下进行机器人定位,可以利用WiFi信号进行测量。WiFi信号的强度和到达时间等信息可以用于确定机器人相对于WiFi AP(接入点)的位置。
2. 系统建模:首先,需要建立机器人的状态空间模型和观测模型。状态空间模型描述机器人的动力学特性和运动行为,而观测模型将WiFi测量数据与机器人的位置进行关联。
3. 粒子表示:为了估计机器人的位置,使用一组粒子来表示机器人的可能位置。每个粒子代表机器人的一个假设位置,这些粒子由状态空间模型进行迭代演化。
4. 粒子滤波更新:根据收集到的WiFi测量数据,需要对粒子进行状态更新。这是通过计算每个粒子的观测概率来实现的,观测概率反映了粒子位置与测量数据之间的匹配程度。
5. 粒子滤波重采样:随着时间推移和系统演化,粒子权重会发生变化。为了保持重要粒子的多样性并去除不重要的粒子,需要进行重采样操作。重采样后的粒子分布更加准确地反映机器人的实际位置。
6. 位置估计:根据粒子的权重,可以计算机器人的位置估计值。一种常见的方法是使用具有较高权重的粒子通过加权平均值来估计机器人的位置。
该研究涉及机器人定位中的粒子滤波器和WiFi测量仪的结合。具体的研究内容可能涉及WiFi信号模型、粒子滤波算法优化和实时定位等方面。研究的目标是利用WiFi测量数据提供高精度和实时的机器人室内定位解决方案。
需要注意的是,WiFi信号的可用性和稳定性会受到室内环境的影响,如信号干扰、衰减和多径效应。因此,在研究中需要考虑这些因素,并尝试通过滤波和校准等方法来提高定位精度和稳定性。
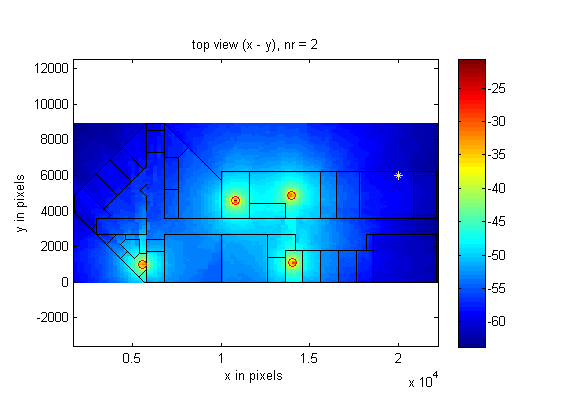
本文通过使用WiFi信号校正Odometric测量值,使用粒子过滤器跟踪机器人。演示如何通过粒子过滤器对机器人进行定位。WiFi测量由光线追踪引擎建模,允许多达3面墙的反射。粒子过滤器有助于校正非全息机器人轨迹的测程法。
📚2 运行结果


部分代码:
%% Demo illustring WiFi propagation loss in indoor building
clear,close all
nb_pts = 100;
nr = 2;
option.TX = 0;
option.RX = 0;
option.path = 0;
flp = load_flp('norwich01.flp');
temp = flp.geom.planes([1 , 4 , 7] , :);
xmin = min(temp(:));
xmax = max(temp(:));
temp = flp.geom.planes([2 , 5 , 8] , :);
ymin = min(temp(:));
ymax = max(temp(:));
temp = flp.geom.planes([3 , 6 , 9] , :);
zmin = min(temp(:));
zmax = max(temp(:));
vectx = (xmin:(xmax-xmin)/(nb_pts-1):xmax);
vecty = (ymin:(ymax-ymin)/(nb_pts-1):ymax);
[X , Y] = meshgrid(vectx , vecty);
Z = ((zmax-zmin)/2)*ones(nb_pts , nb_pts);
RX = [X(:) , Y(:) , Z(:)]';
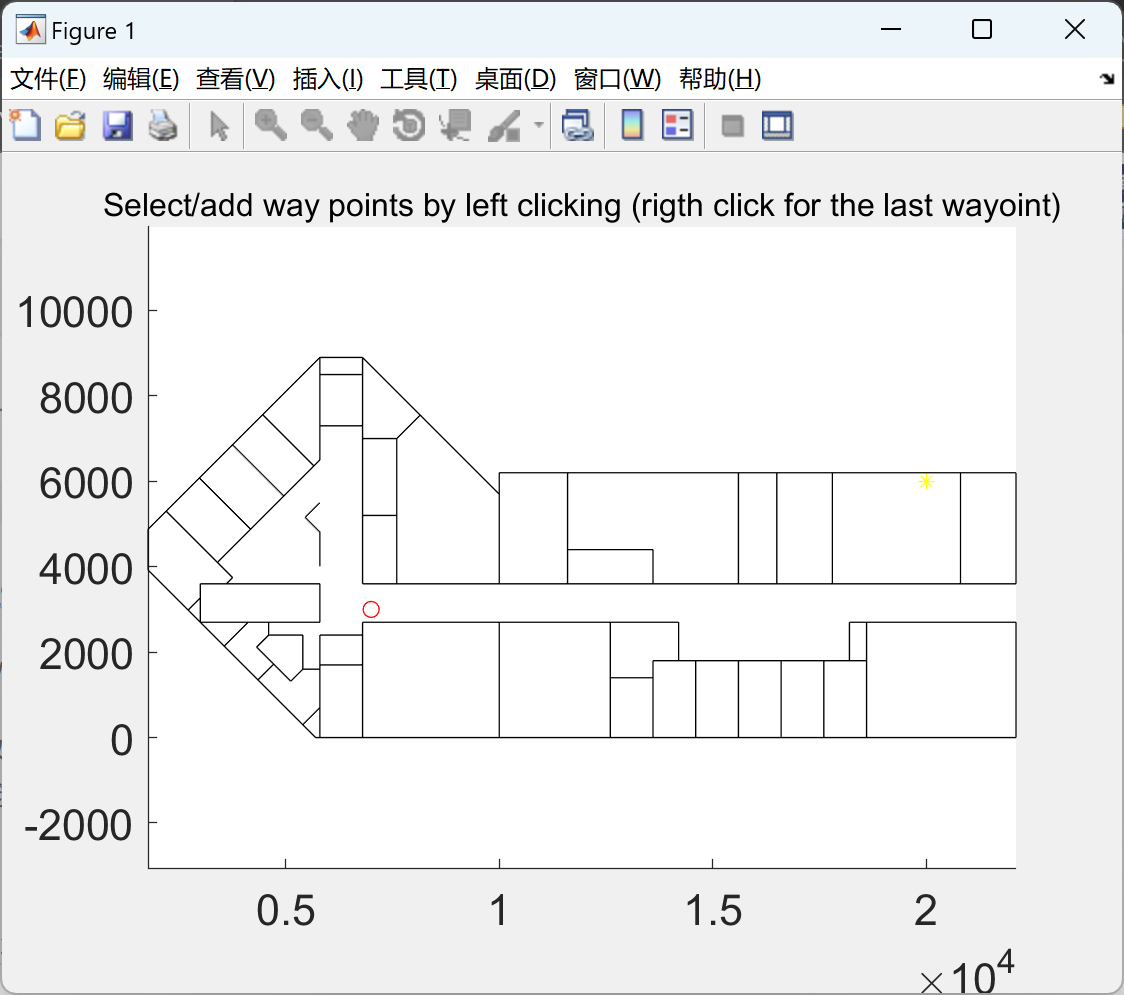
figure(1)
plot_flp(flp , option);
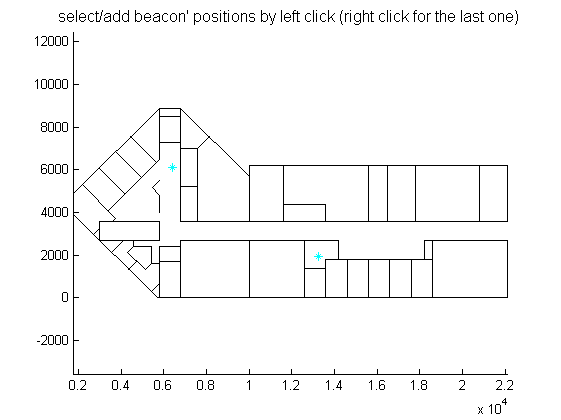
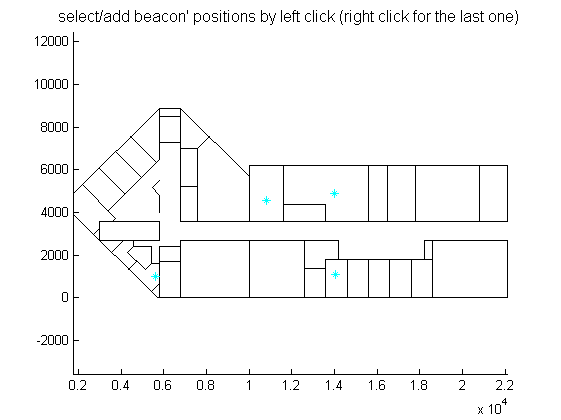
title('select/add beacon'' positions by left click (right click for the last one)', 'fontsize' , 12)
hold on
[x , y] = getpts;
temp = (zmax-zmin)/2;
flp.info.TXpoint = [x' ; y' ; temp(: , ones(1 , length(x)))];
% flp.info.TXpoint = [6000 ; 6000 ; 500];
plot(flp.info.TXpoint(1 , :) , flp.info.TXpoint(2 , :) , 'c*');
drawnow
hold off
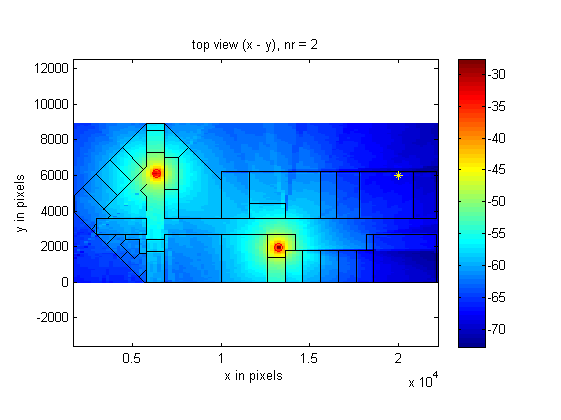
rs_amp = total_power3(flp.info.TXpoint , RX , flp.geom.planes , flp.geom.material , flp.info.fc , nr);
figure(2)
imagesc(vectx , vecty , 20*log10(reshape(sum(rs_amp , 1) , nb_pts, nb_pts)));
hold on
plot_flp(flp);
title(sprintf('top view (x - y), nr = %d',nr))
%title('three dimensional view')
xlabel('x in pixels')
ylabel('y in pixels')
zlabel('z in pixles')
axis xy
% view(0,90);
% axis equal
colorbar
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]黄猛,杜红彬.移动机器车的WiFi接口设计[J].自动化仪表,2010,31(03):50-52+56.DOI:10.16086/j.cnki.issn1000-0380.2010.03.007.
[2] 杨博宇, 张煜翔, 王浩然等. (2018). 基于WiFi测量的移动机器人定位研究. 自动化仪表, 39(11), 110-117.