贵州网站建设seo郑州seo培训班
layout: post
title: leetcode重点题目分类别记录(二)基本算法:二分,位图,回溯,动态规划,拓扑排序
description: leetcode重点题目分类别记录(二)基本算法:二分,位图,回溯,动态规划,拓扑排序
tag: 数据结构与算法
基本算法:二分,位图,回溯,动态规划,图搜索,拓扑排序
- 二分查找
- 搜索插入位置
- 搜索旋转数组
- 前缀和
- 一维
- 二维
- 差分数组
- 题目应用
- 回溯
- 组合
- 排列
- 分割问题
- 分割回文串
- 复原ip地址
- 子集问题
- 子集2
- 递增子序列
- 子集2的另一种去重方法
- 暴力搜索
- 动态规划
- 背包问题
- 01背包
- 完全背包
- 打家劫舍
- 股票系列
- 子序列类
- 数位dp
- 图搜索
- 广度优先搜索bfs
- 迷宫最近的出口
- 解开密码锁的最少次数
- 双向bfs优化
- 深度优先搜素dfs
- 图论基础及其遍历算法
- 基本概念
- 邻接表和邻接矩阵
- 度
- 加权图
- 无向图
- 图的遍历
- 题目应用
- 可能的路径
- 二分图判断算法
- 概念
- 二分图判断思路
- 题目应用
- 拓扑排序
部分内容来自拉不拉东的算法小抄
二分查找
搜索插入位置
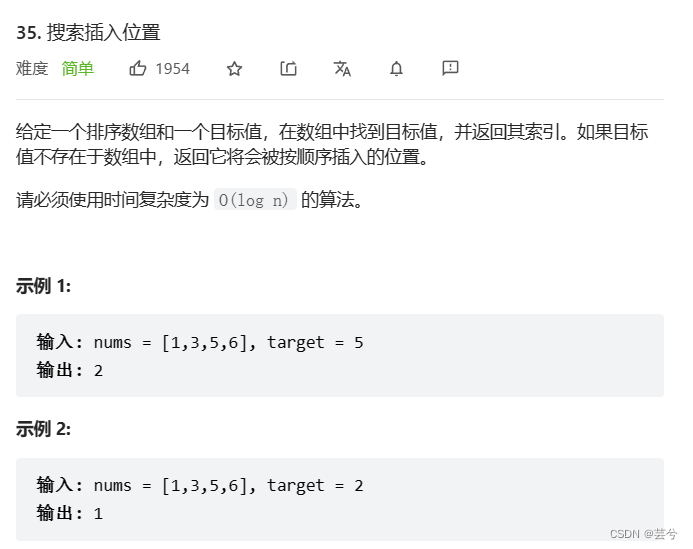
二分查找本质上是排除法的思路,不断将搜索空间缩减为原来的一半,因此整体的时间复杂度为O(LogN),不同的题目需要注意ans的候选位置。
例如本题搜索插入位置,返回插入位置的索引:
如果mid处等于目标值,那么直接返回mid
如果mid处大于目标值,说明目标值应该插在mid左边,那么ans候选位置就是mid;
如果mid处小于目标值,说明目标值应该插入mid右边,那么ans候选位置就是mid+1;
int searchInsert(vector<int>& nums, int target) {int left = 0, right = nums.size() - 1, ans = left;while (left <= right) {int mid = left + ((right - left) >> 1);if (nums[mid] == target) return mid;if (nums[mid] > target) {// target在左边,更新右边界,mid处为可能的插入位置ans = mid;right = mid - 1;} else {// target 在右边,更新左边界,mid + 1处为可能的插入位置left = mid + 1;ans = left;}}return ans;}
搜索旋转数组
基础版:没有重复元素
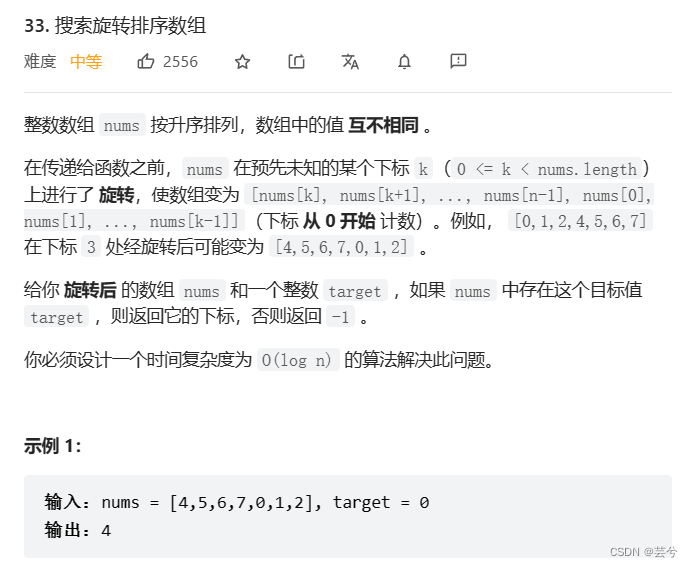
int search(vector<int>& nums, int target) {int left = 0, n = nums.size(), right = n - 1;while (left <= right) {int mid = left + ((right - left) >> 1);if (nums[mid] == target) return mid;if (nums[mid] >= nums[0]) { // 通过与nums[0]比较判断nums[mid]的落点在断点左边或右边// 在断点左边这部分有序区间二分if (target >= nums[0] && target < nums[mid]) right = mid - 1; // 如果目标值与中间值在同一部分有序区间,可以排除一半,并进入有序空间的排序else left = mid + 1; // 即使不在同一部分,也可以缩减搜索整个区间的范围} else {// 在断点右边这部分有序区间二分if (target > nums[mid] && target <= nums[right]) left = mid + 1;else right = mid - 1;}}return -1;}
前缀和
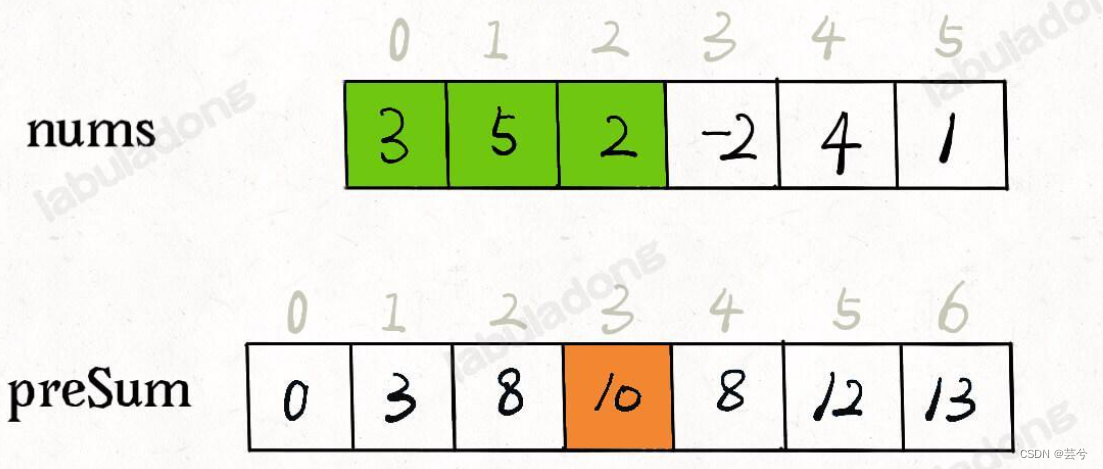
前缀和适用于很快的求解某个区间的累计和
一维
preSum[i]记录前i个数的累计和,i从0开始,那么
preSum[right] - preSum[left] 就是左闭右开区间[left, right)的nums子数组和。
二维
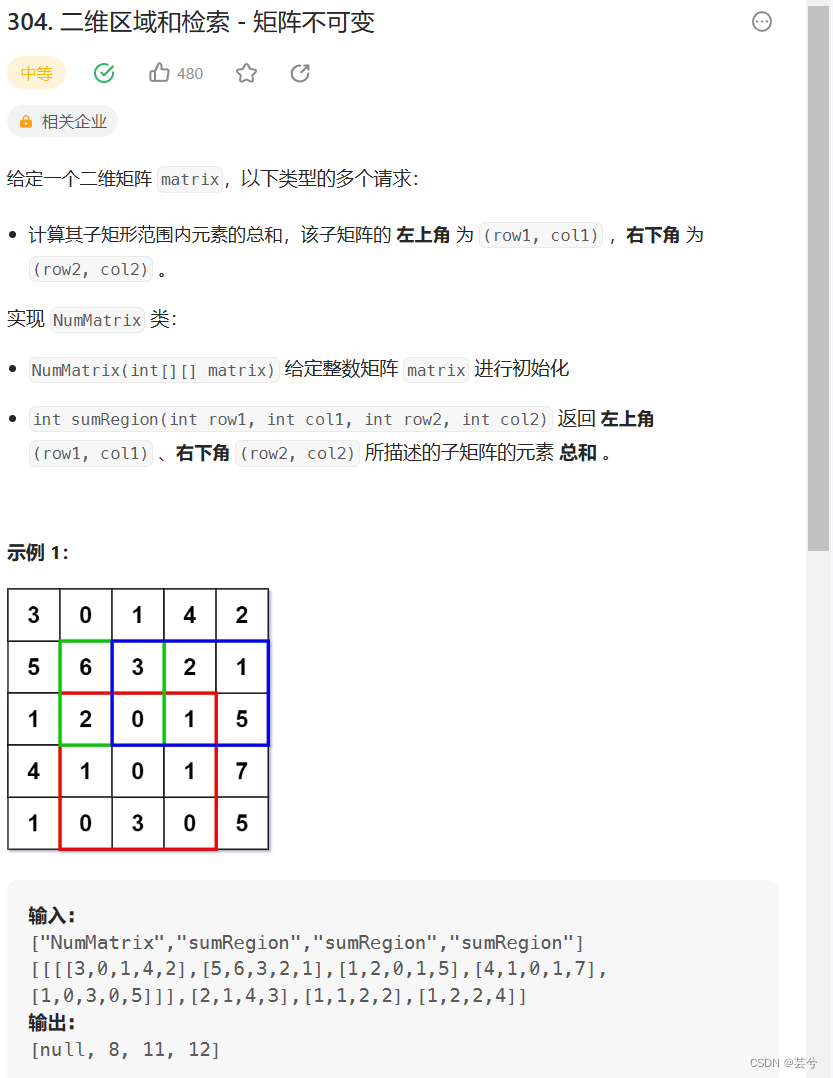
仿照一维的思路,用pre[i + 1][j + 1]表示从左上角到下标(i,j)位置表示的右下角位置间区域的累计和。
那么任意一个矩形区间的累计和可标记为:
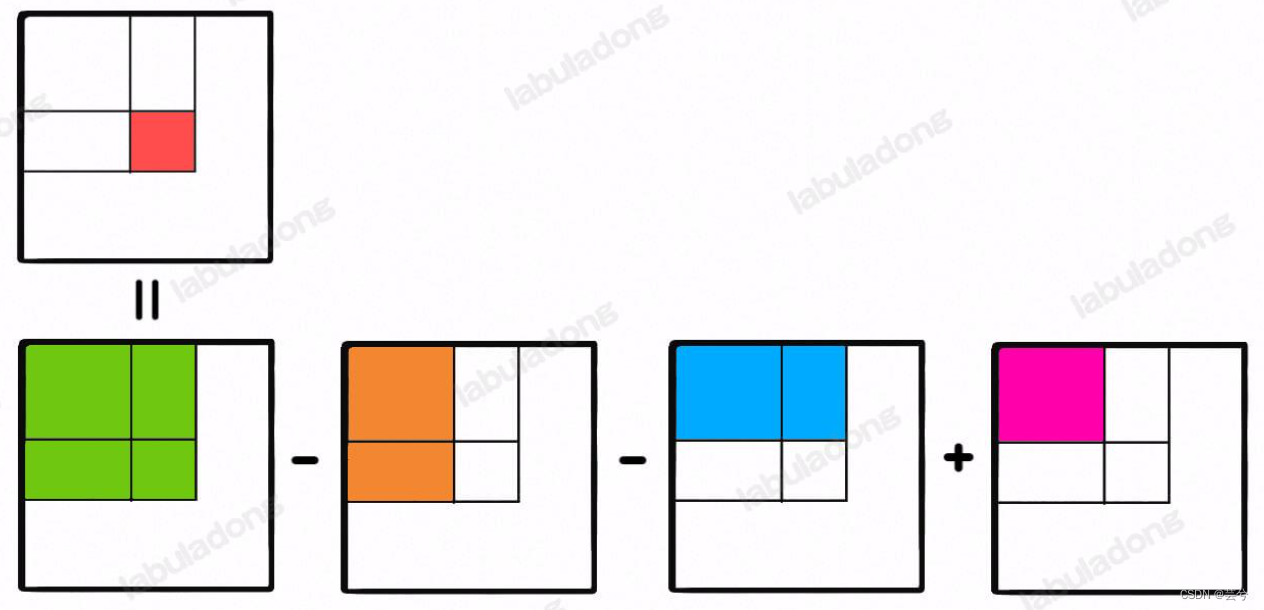
注意:在下边的代码中,在计算累加时的方法为:
presum[i + 1][j + 1] = presum[i + 1][j] + presum[i][j + 1] + matrix[i][j] - presum[i][j];
左上角部分加了两次,要减去
而计算区间时,左上角部分减了两次要加回来:
presum[row2 + 1][col2 + 1] + presum[row1][col1] - presum[row1][col2 + 1] - presum[row2 + 1][col1];
class NumMatrix {
public:vector<vector<int>> presum;NumMatrix(vector<vector<int>>& matrix) {int m = matrix.size(), n = matrix[0].size();presum = vector<vector<int>>(m + 1, vector<int>(n + 1));for (int i = 0; i < m; ++i) {for (int j = 0; j < n; ++j) {presum[i + 1][j + 1] = presum[i + 1][j] + presum[i][j + 1] + matrix[i][j] - presum[i][j];}}}int sumRegion(int row1, int col1, int row2, int col2) {return presum[row2 + 1][col2 + 1] + presum[row1][col1] - presum[row1][col2 + 1] - presum[row2 + 1][col1]; }
};
差分数组
差分数组的主要适用场景是频繁对原始数组的某个区间的元素进行增减。
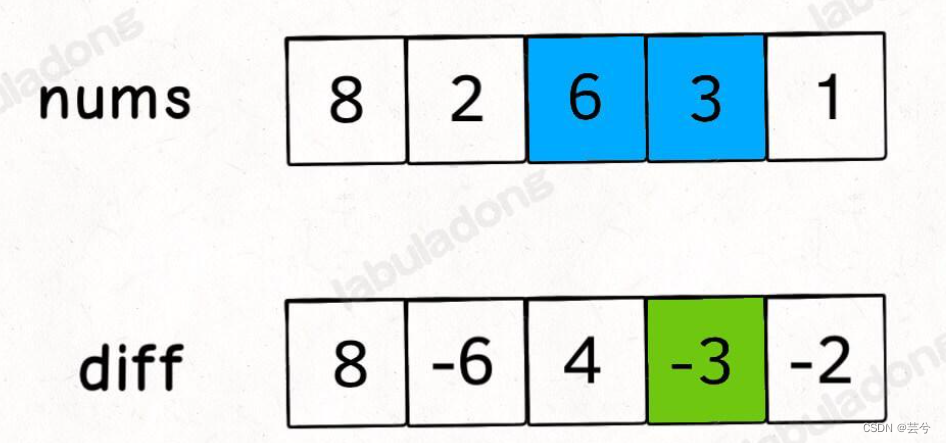
差分数组的求法:
第一个数与nums[0],后边每个数等于该处下标 减去 前一个下标。
后减去前,第一个位置前面没有,故是本身
diff[0] = nums[0];
diff[i] = nums[i] - nums[i - 1];
可以发现,根据差分数组diff可以还原出nums数组,具体做法就是对差分数组diff求累计和
因为是求累计和,所以假定我们给diff数组i位置处增减一个元素值,那么它后边位置处都会增减该元素值。
具体的,假定你要让左闭右开区间[left, right)上的元素都加上k, 那么只需令差分数组diff[left] += k,diff[right] -= k;
我们可以将上述过程写成一个封装的类,输入一个nums数组,设置increament方法。
特别需要注意的是:
构建差分数组diff[]时,需要右减左,而恢复时是需要累加。
class Difference {public:vector<int> diff;Difference(const vector<int> &nums){diff = nums;for (int i = 1; i < nums.size(); ++i) {diff[i] -= nums[i - 1]; }}// 给左闭右开区间[i, j) 增加val,val可以是负数void increment(int i, int j, int val) {diff[i] += val;if (j < diff.size()) diff[j] -= val;}vector<int> getResult() {vector<int> res(diff);for (int i = 1; i < res.size(); ++i) {res[i] += res[i - 1];}return res;}
};
题目应用
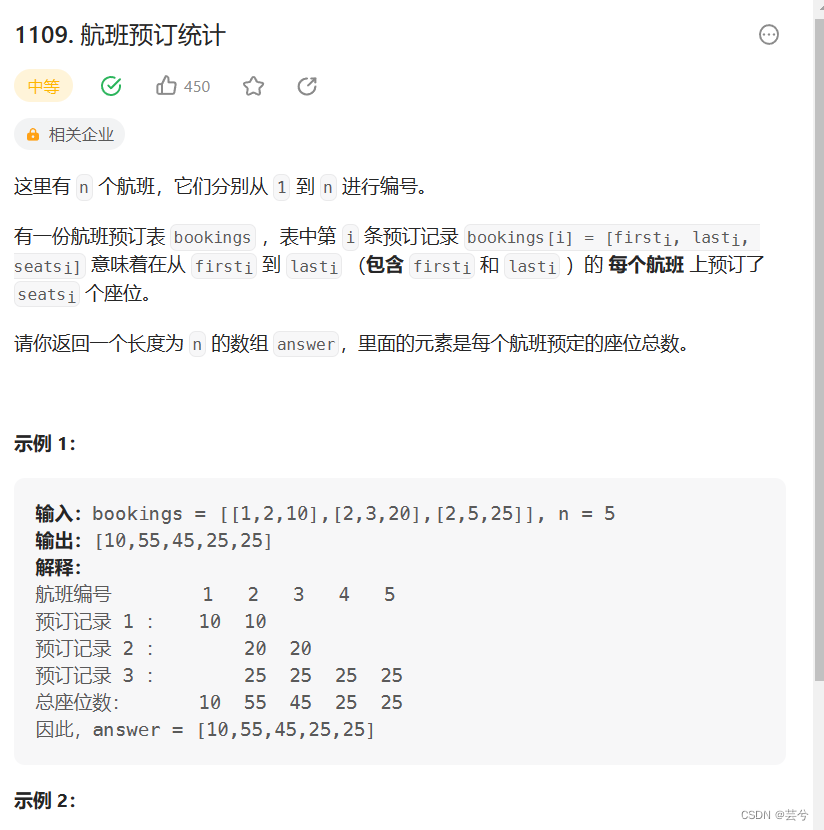
分析题意,其实就是初始answer都是0,根据bookings,将对应区间都加上座位数。
可以直接利用上边写的差分数组类:
注意我们写的时候,是对左必右开区间,同时增加。
而题目的意思是左右闭区间,此外航班序号比索引号大1.
vector<int> corpFlightBookings(vector<vector<int>>& bookings, int n) {vector<int> nums(n);Difference d(nums);for (int i = 0; i < bookings.size(); ++i) {int x = bookings[i][0] - 1, y = bookings[i][1], val = bookings[i][2];d.increment(x, y, val);}return d.getResult();}
回溯
组合
注意剪枝:
当前可选的数据范围为[i, n] 有 n - i + 1个
还需要的数据个数为 k - path.size();
可选范围必须大于等于所需的元素。
vector<vector<int>> combine(int n, int k) {vector<vector<int>> ans;vector<int> path;function<void(int)> backtracking = [&](int index) {if (path.size() == k) {ans.push_back(path);return;}for (int i = index; i <= n && path.size() + n - i + 1 >= k; ++i) {path.push_back(i);backtracking(i + 1);path.pop_back();}};backtracking(1);return ans;}
排列

排序问题与组合问题最大的区别在于,前边的选择是否影响后边的选择
比如:1,2,3
如果第一步选择了2,那么后边可选的只剩下3
而排列中,第一步选择了2,后边还是可以选择1或3
对应在代码中,组合问题一般回溯到下一层传递的是 i + 1,i是当前选择的位置,而排序则是index + 1,按照 index即层序来更新,而非当前选择的位置i。
vector<vector<int>> permute(vector<int>& nums) {vector<vector<int>> ans;function<void(int)> dfs = [&] (int index) {if (index == nums.size()) {ans.push_back(nums);return;}for (int i = index; i < nums.size(); ++i) {swap(nums[i], nums[index]);dfs(index + 1);swap(nums[i], nums[index]);}};dfs(0);return ans;}
有重复情况下的排列去重逻辑与组合一样。与组合不同的地方在于,每个位置都有可能添加到当前path的末尾,因此需要一个used数组,然后每次遍历整个nums。
vector<vector<int>> permuteUnique(vector<int>& nums) {sort(nums.begin(), nums.end());vector<vector<int>> ans;vector<int> path;vector<bool> used(nums.size(), false);function<void()> dfs = [&] () {if (path.size() == nums.size()) {ans.push_back(path);return;}for (int i = 0; i < nums.size(); ++i) {if (i > 0 && nums[i] == nums[i - 1] && used[i - 1] == false) continue;if (used[i] == false) {path.push_back(nums[i]);used[i] = true;dfs();path.pop_back();used[i] = false;}}};dfs();return ans;}
分割问题
分割回文串
分割问题的本质为确定分割线的位置可能;
根据一个起始的分割点,枚举所有可能的下一个分割点,如果当前分割出了回文串,进入更深层次的搜索。
class Solution {
public:vector<vector<string>> partition(string s) {vector<vector<string>> ans;vector<string> path;function<void(int)> dfs = [&](int index) {if (index == s.size()) {ans.push_back(path);return;}for (int i = index; i < s.size(); ++i) {string str = s.substr(index, i - index + 1);if (isValid(str)) {path.push_back(str);dfs(i + 1);path.pop_back();}}};dfs(0);return ans;}bool isValid(const string &str) {for (int i = 0, j = str.size() - 1; i <= j; ++i, --j) {if (str[i] != str[j]) return false;}return true;}
};
复原ip地址

复原ip地址问题,同样是确定分割点,这里比较复杂的地方在于剪枝。
class Solution {
public:vector<string> restoreIpAddresses(string s) {vector<string> ans;vector<string> path;if (s.size() < 4 || s.size() > 12) return ans;function<void(int)> dfs = [&](int index) {// 根据当前位置和剩余的字符确定剩余部分是否能够构成一个有效的部分int leftPart = 4 - path.size(), leftChar = s.size() - index;if (leftChar < leftPart || leftChar > 3 * leftPart) return;if (path.size() == 3) {string leftStr = s.substr(index, leftChar);if (isValid(leftStr)) {string res;for (string str : path) res += str + ".";res += leftStr;ans.push_back(res);}return;}// i < index + 3 保证了分割出的子串长度小于等于3for (int i = index; i < s.size() && i < index + 3; ++i) {string str = s.substr(index, i - index + 1);if (isValid(str)) {path.push_back(str);dfs(i + 1);path.pop_back();}}};dfs(0);return ans;}bool isValid(const string &str) {if (str.size() == 1) return true;if (str[0] == '0') return false;int num = 0;for (char c : str) num = num * 10 + (c - '0');return num <= 255;}
};
子集问题
子集2
子集问题与回溯中其他问题最大的区别在于,不需要设置回溯的终点,因为回溯路径上每一个节点都是最终所需的一个path;因此上来就需要将当前path加入到ans中,且不能return,选或者不选都是一种子集可能的情况。
vector<vector<int>> subsetsWithDup(vector<int>& nums) {vector<vector<int>> ans;vector<int> path;sort(nums.begin(), nums.end());vector<bool> used(nums.size(), false);function<void(int)> dfs = [&] (int index) {ans.push_back(path);for (int i = index; i < nums.size(); ++i) {if (i > 0 && nums[i] == nums[i - 1] && !used[i - 1]) continue;path.push_back(nums[i]);used[i] = true;dfs(i + 1);path.pop_back();used[i] = false;}};dfs(0);return ans;}
递增子序列
该题与子集2有相似的地方:每次需要取路径树上的节点,即选或者不选都是一种可能,回溯开始就考虑是否将path添加到ans中;
另一个相似的地方在于需要去重。
这一题去重的逻辑比子集稍微复杂一些,首先它也是在当前层去重,当前层如果已经选择了某个元素,当前层的后边节点就不可以在使用。
但是子集2中,不要求输出顺序,因此可以对其进行排序,把重复元素堆在一块儿。
这里则不行,需要使用一个单独的hash表来记录当前层使用了哪些元素。注意这里的hash表只对当前回溯过程中当前层使用,与used数组不同!!!
vector<vector<int>> findSubsequences(vector<int>& nums) {vector<vector<int>> ans;vector<int> path;int n = nums.size();function<void(int)> dfs = [&] (int index) {if (path.size() > 1) ans.push_back(path);int hash[201] = {0};for (int i = index; i < n; ++i) {if ((!path.empty() && path.back() > nums[i]) || hash[nums[i] + 100] == 1) continue;path.push_back(nums[i]);hash[nums[i] + 100] = 1;dfs(i + 1);path.pop_back();}};dfs(0);return ans;}
子集2的另一种去重方法
子集问题实际上也可以使用上边这种在单层使用hash表记录的形式。
并且我认为这种形式实际上更加直观易懂!!!
vector<vector<int>> subsetsWithDup(vector<int>& nums) {vector<vector<int>> ans;vector<int> path;sort(nums.begin(), nums.end());function<void(int)> dfs = [&] (int index) {ans.push_back(path);int hash[21] = {0};for (int i = index; i < nums.size(); ++i) {if (hash[nums[i] + 10] == 1) continue;path.push_back(nums[i]);hash[nums[i] + 10] = 1;dfs(i + 1);path.pop_back();}};dfs(0);return ans;}
暴力搜索
动态规划
背包问题
01背包
完全背包
打家劫舍
股票系列
子序列类
数位dp
图搜索
广度优先搜索bfs
广度优先搜索最经典的题目就是二叉树的层序遍历。
广度优先搜索的问题的本质就是让你在一幅图中找到从起点start到终点target的最近距离。
迷宫最近的出口

思路:每次有四个方向可以选择,使用bfs搜索,将非墙的位置加入到队列中。为了避免走重复的路,在加入队列后,将相应位置标记为墙。当来到边界位置处,边是最近的出口。为了记录距离,可以把位置距离起点的距离同时记录到队列中的节点。
int nearestExit(vector<vector<char>>& maze, vector<int>& entrance) {int m = maze.size(), n = maze[0].size();const int dx[4] = {1, -1, 0 , 0}, dy[4] = {0, 0, 1, -1}; // 偏移量数组queue<tuple<int, int, int>> que; // 包含位置x,y和距离起点距离的节点队列que.emplace(entrance[0], entrance[1], 0); maze[entrance[0]][entrance[1]] = '+'; // 每次加入队列后,将位置改为墙,避免重复while (!que.empty()) {auto [x, y, d] = que.front();que.pop();for (int i = 0; i < 4; ++i) {int cx = x + dx[i], cy = y + dy[i];if (cx >= 0 && cx < m && cy >= 0 && cy < n && maze[cx][cy] == '.') { // 只有相邻位置可走才进行判断与加入队列的操作if (cx == 0 || cx == m - 1 || cy == 0 || cy == n - 1) return d + 1; // 如果其中一个有效相邻位置为边缘处,说明找到出口了que.emplace(cx, cy, d + 1);maze[cx][cy] = '+'; // 每次加入队列后,将位置改为墙,避免重复}}}return -1;}
解开密码锁的最少次数
class Solution {
public:// 将i位置数字加一string plusone(string s, int i) {if (s[i] == '9') {s[i] = '0';return s;}++s[i];return s;}// 将i位置数字减一string minusone(string s, int i) {if (s[i] == '0') {s[i] = '9';return s;}--s[i];return s;}int openLock(vector<string>& deadends, string target) {const string root = "0000";if (target == root) return 0; // 如果目标值就是当前值,直接返回unordered_set<string> visited;for (string &str : deadends) visited.insert(str); // 死亡数字相当于已经访问过,不能再访问queue<string> que;if (!visited.count(root)) { // 只有非访问过的节点才能加入队列,入队即访问que.push(root);visited.insert(root);}int ans = 0;while (!que.empty()) {int sz = que.size();for (int i = 0; i < sz; ++i) {string cur = que.front();que.pop();for (int j = 0; j < 4; ++j) { // 四个数字轮流上下转动string plus = plusone(cur, j);if (plus == target) return ans + 1; // 如果转到target,返回ans + 1if (!visited.count(plus)) { // 只有非访问过的节点才能加入队列,入队即访问que.push(plus);visited.insert(plus);}string minus = minusone(cur, j);if (minus == target) return ans + 1;if (!visited.count(minus)) { // 只有非访问过的节点才能加入队列,入队即访问que.push(minus);visited.insert(minus);}}}++ans;}return -1;}
};
双向bfs优化
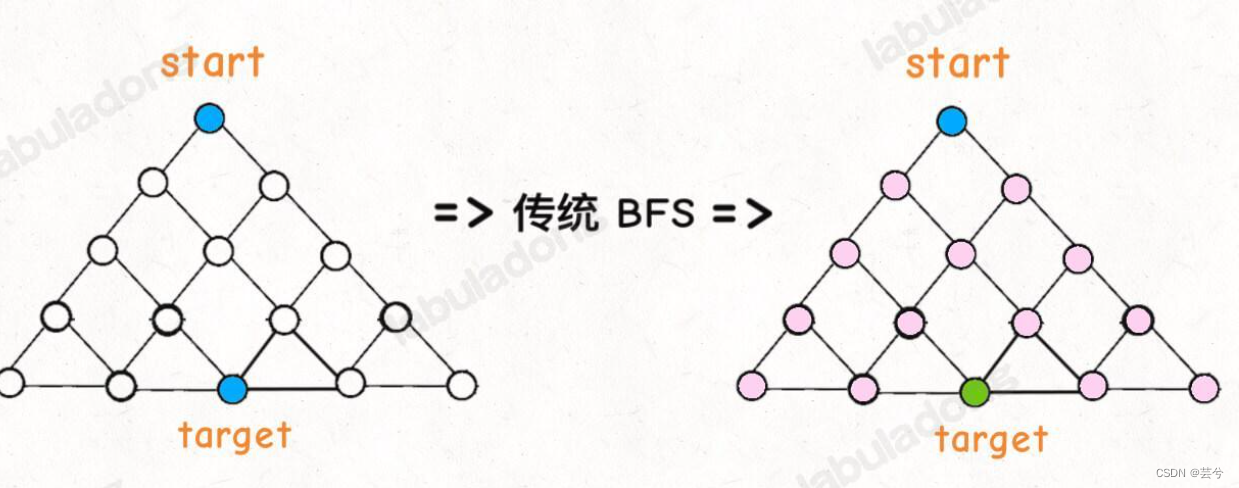
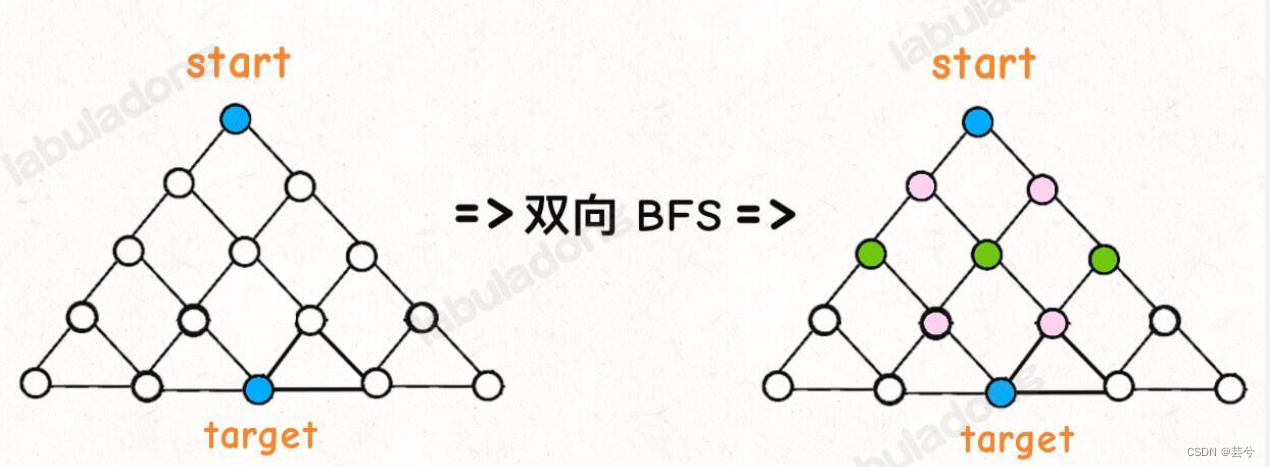
传统的 BFS 框架就是从起点开始向四周扩散,遇到终点时停止;而双向 BFS 则是从起点和终点同时开始扩散,当两边有交集的时候停止。
因为双向bfs需要从两头开始扩散,因此必须指定目标点位置!
传统bfs是从起点位置不断向周围扩散,直至扩散至目标处。
双向bfs从起点和终点两头扩散,看最终是否能够有交集。
深度优先搜素dfs
图论基础及其遍历算法
基本概念
邻接表和邻接矩阵
邻接表和邻接矩阵是存储图结构的两种主要的方式方式:
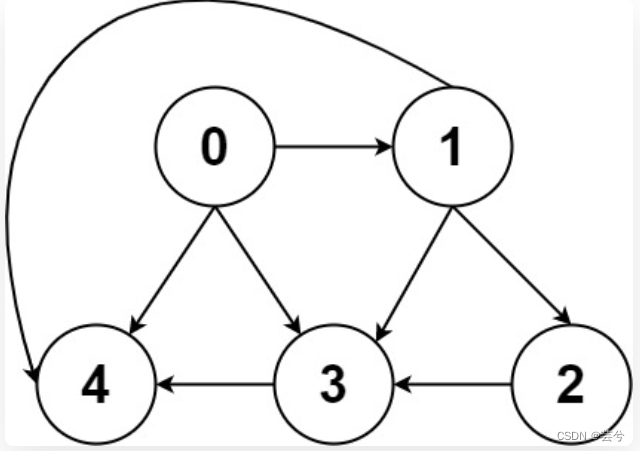
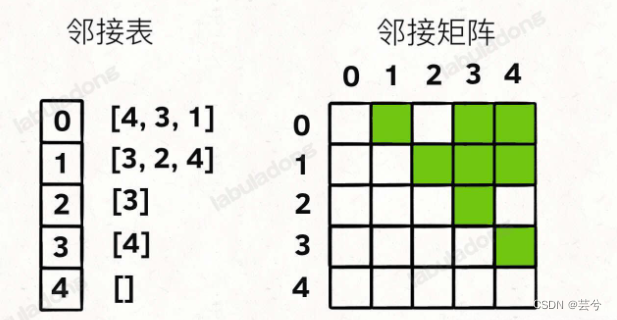
邻接表很直观,把每个节点x的邻居都存到一个列表里,然后把x和这个列表关联起来,这样就可以通过一个节点x找到它的所有相邻节点。
邻接矩阵则是一个二维布尔数组,我们权且称为matrix,如果节点x和y是相连的,那么就把matrix[x][y]设为true,如果想找节点x的邻居,那么遍历一遍matrix[x][…]就够了。
代码形式如下:
// 邻接表
// graph[x] 存储 x 的所有邻居节点
vector<int> graph[];// 邻接矩阵
// matrix[x][y] 记录 x 是否有一条指向 y 的边
bool matrix[][];邻接表的优点在于占用空间少,因为邻接矩阵有很多空余空间浪费。但是邻接表无法快速判断两个节点是否相邻,而临界矩阵却可以。因此两种形式各有利弊,使用时需结合具体情况。
度
在无向图中,度就是每个节点相连的边的条数,由于有向图的边是有方向的,因此每个节点的度又被细分为出度和入度。
加权图
有时图中还需要存储每个节点与相邻节点间的权重(距离),对于这种加权图:
如果采用邻接表的形式存储,在储存邻居点标号的同时,还需记录对应的权重;
如果采用邻接矩阵,那么matrix[x][y]不再是布尔值,而是一个int值,0表示没有连接,其他值表示权重。
代码形式如下:
vector<pair<int, int>> graph[];// 邻接矩阵
// matrix[x][y] 记录 x 指向 y 的边的权重,0 表示不相邻
vector<vector<int>> matrix;
无向图
如果是无向图,其实等同于每个相邻节点是双向的。
如果连接无向图中的节点 x 和 y,把 matrix[x][y] 和 matrix[y][x] 都变成 true 不就行了;邻接表也是类似的操作,在 x 的邻居列表里添加 y,同时在 y 的邻居列表里添加 x。
把上面的技巧合起来,就变成了无向加权图。
图的遍历
图的遍历与多叉树是类似的,使用dfs遍历图可能是包含环的,为了避免重复遍历,需要一个visited数组进行辅助,如果题目告诉了不包含环,那么可以去掉visited数组
void traverse(TreeNode root) {if (root == null) return;for (TreeNode child : root.children) {printf("进入节点 %s", child);traverse(child);printf("离开节点 %s", child);}
}
如果执行上边的遍历算法,会发现这种方式会把根节点遗漏,为了避免遗漏,我们应该将打印时机放在for循环外部:
void traverse(TreeNode root) {if (root == null) return;printf("进入节点 %s", root);for (TreeNode child : root.children) {traverse(child);}printf("离开节点 %s", root);
}
题目应用
可能的路径
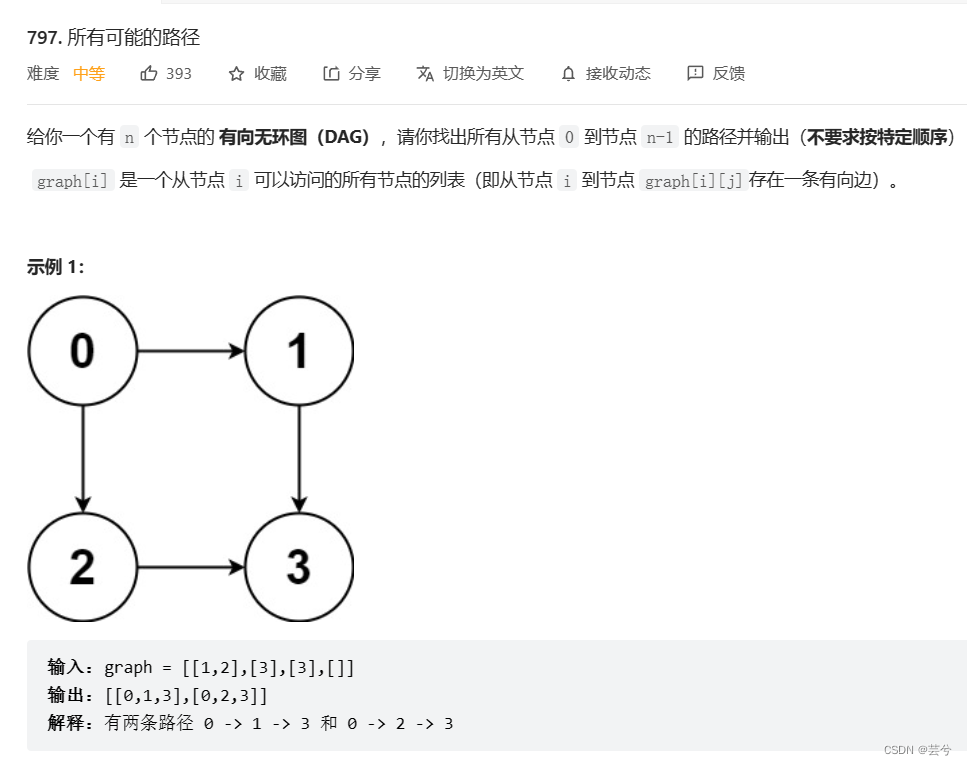
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {vector<vector<int>> ans;vector<int> path;int n = graph.size();// 根据遍历起始点,搜索下一步可以到达的位置function<void(int)> traverse = [&] (int cur) {// 记录path.push_back(cur);if (cur == n - 1) {ans.push_back(path);}for (int c : graph[cur]) traverse(c);// 撤销当前的记录path.pop_back();};traverse(0);return ans;}
二分图判断算法
概念
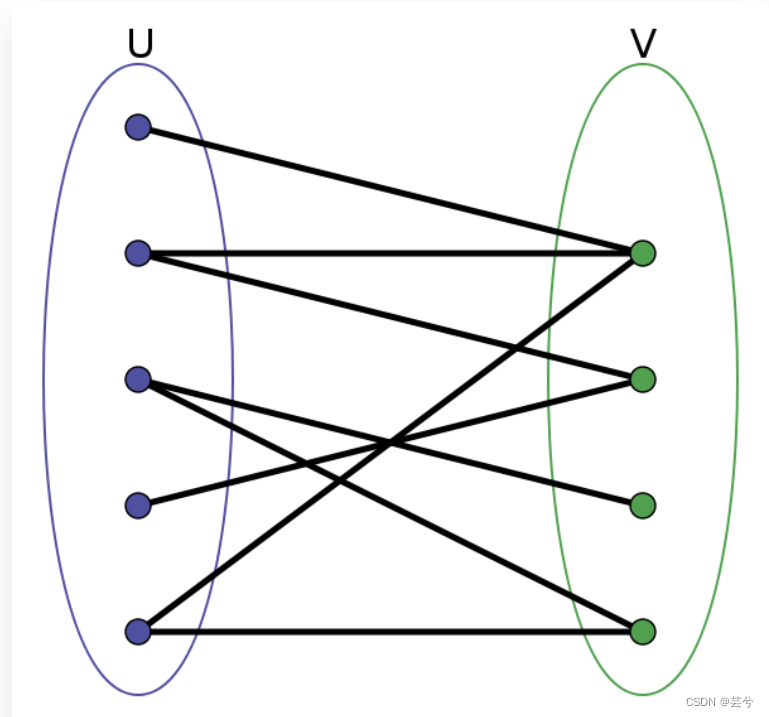
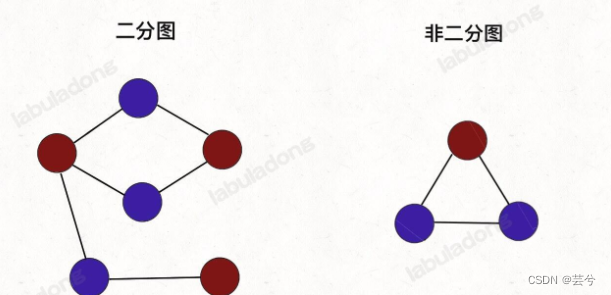
二分图的定义:
二分图的顶点集可分割为两个互不相交的子集,图中每条边依附的两个顶点都分属于这两个子集,且两个子集内的顶点不相邻。
从定义上不太好理解,但可以用双色问题来等同于二分图问题。
给你一幅「图」,请你用两种颜色将图中的所有顶点着色,且使得任意一条边的两个端点的颜色都不相同,你能做到吗?
如果能,那么这幅图就是二分图,反之则不是。
从简单实用的角度来看,二分图结构在某些场景可以更高效地存储数据。
比如说我们需要一种数据结构来储存电影和演员之间的关系:某一部电影肯定是由多位演员出演的,且某一位演员可能会出演多部电影。
既然是存储映射关系,最简单的不就是使用哈希表嘛,我们可以使用一个 HashMap<String, List> 来存储电影到演员列表的映射,如果给一部电影的名字,就能快速得到出演该电影的演员。
但是如果给出一个演员的名字,我们想快速得到该演员演出的所有电影,怎么办呢?这就需要「反向索引」,对之前的哈希表进行一些操作,新建另一个哈希表,把演员作为键,把电影列表作为值。
显然,如果用哈希表存储,需要两个哈希表分别存储「每个演员到电影列表」的映射和「每部电影到演员列表」的映射。但如果用「图」结构存储,将电影和参演的演员连接,很自然地就成为了一幅二分图:
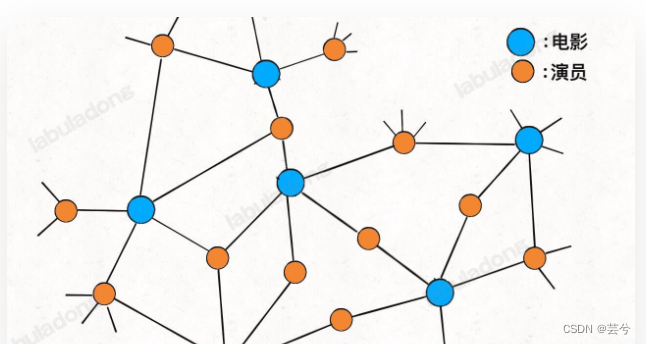
每个电影节点的相邻节点就是参演该电影的所有演员,每个演员的相邻节点就是该演员参演过的所有电影,非常方便直观。
其实生活中不少实体的关系都能自然地形成二分图结构,所以在某些场景下图结构也可以作为存储键值对的数据结构(符号表)。
二分图判断思路
判定二分图的算法很简单,就是用代码解决「双色问题」。
说白了就是遍历一遍图,一边遍历一边染色,看看能不能用两种颜色给所有节点染色,且相邻节点的颜色都不相同。
// 二叉树遍历框架
void traverse(TreeNode* root) {if (root == nullptr) return;traverse(root->left);traverse(root->right);
}// 多叉树遍历框架
void traverse(Node* root) {if (root == nullptr) return;for (Node* child : root->children)traverse(child);
}// 图遍历框架
vector<bool> visited;
void traverse(Graph* graph, int v) {// 防止走回头路进入死循环if (visited[v]) return;// 前序遍历位置,标记节点 v 已访问visited[v] = true;for (Vertex neighbor : graph->neighbors(v))traverse(graph, neighbor);
}因为图中可能存在环,所以用 visited 数组防止走回头路。
这里可以看到我习惯把 return 语句都放在函数开头,因为一般 return 语句都是 base case,集中放在一起可以让算法结构更清晰。
回顾一下二分图怎么判断,其实就是让 traverse 函数一边遍历节点,一边给节点染色,尝试让每对相邻节点的颜色都不一样。
所以,判定二分图的代码逻辑可以这样写:
// 图遍历框架
void traverse(Graph graph, bool visited[], int v) {visited[v] = true;// 遍历节点 v 的所有相邻节点 neighborfor (int neighbor : graph.neighbors(v)) {if (!visited[neighbor]) {// 相邻节点 neighbor 没有被访问过// 那么应该给节点 neighbor 涂上和节点 v 不同的颜色traverse(graph, visited, neighbor);} else {// 相邻节点 neighbor 已经被访问过// 那么应该比较节点 neighbor 和节点 v 的颜色// 若相同,则此图不是二分图}}
}题目应用
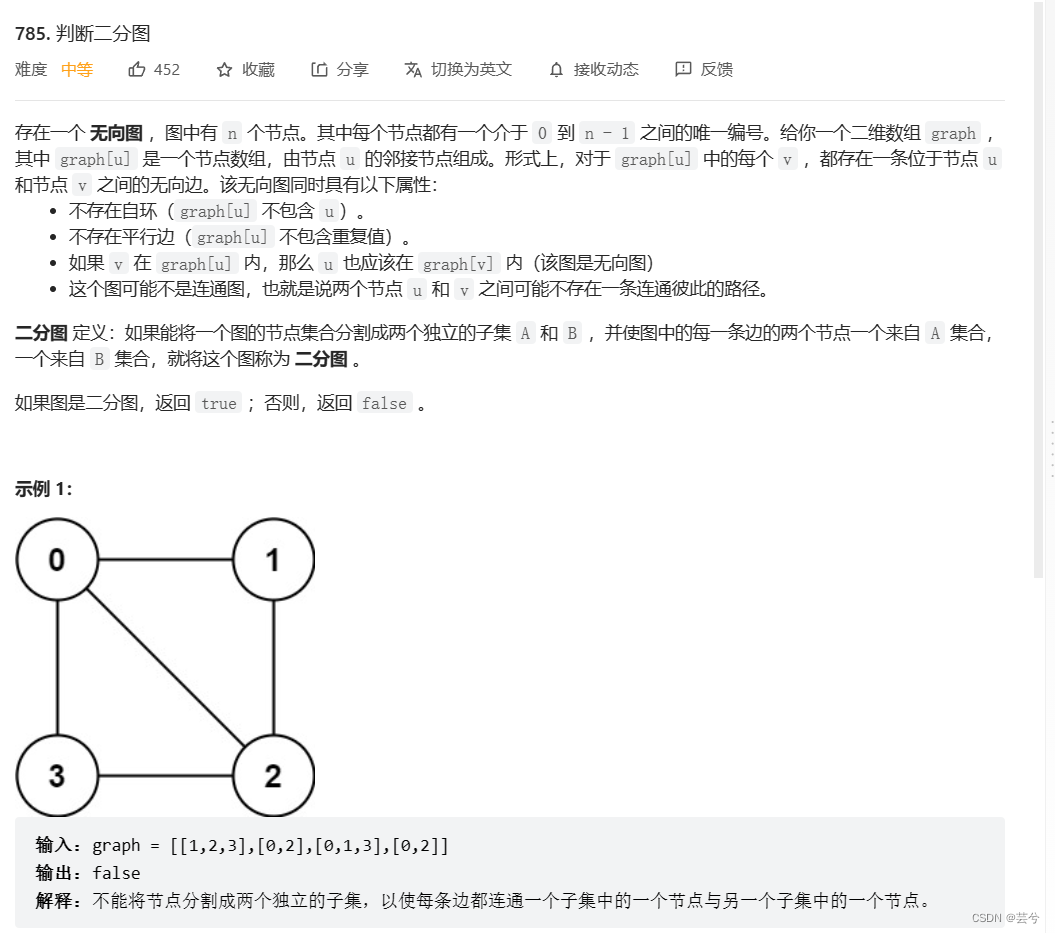
bool isBipartite(vector<vector<int>>& graph) {int n = graph.size();vector<bool> visit(n, false), color(n, false);bool ans = true;function<void(int)> dfs = [&](int cur) {if (!ans) return; // 如果已经非二分图了,直接返回,不需要再遍历了if (visit[cur]) return; // 遍历过的跳过,避免环路重复遍历visit[cur] = true;for (int nb : graph[cur]) {if (!visit[nb]) {// 如果相邻节点没有被访问过,那么给neighbor涂上与cur不一样的颜色color[nb] = !color[cur];dfs(nb); // 接着遍历} else {// 如果相邻节点访问过了,判断它与cur是否颜色不一样,如果一样说明不是二分图if (color[cur] == color[nb]) {ans = false;return;}}}};// 因为图不一定是连通的,可能存在多个子图,所以要把每个节点都作为起点进行一次遍历,如果任意一个子图不是二分图,整个图都不算是二分图for (int v = 0; v < n; ++v) {if (!visit[v]) {dfs(v);}if (!ans) return false; // 如果从某个节点处开始遍历,发现已经出现非二分图了,直接返回false}return true;}